






本文介绍了一个基于深度学习的跳一跳物理外挂制作过程。先准备PaddleDetection,自制199张图片数据集并标注,转成COCO格式。用PPYOLO_Tiny训练模型,经验证、导出后部署。电脑将坐标距离转成按压时间,通过上位机代码向51单片机发指令,单片机按指令操作,还提供了相关代码。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
前言
单片机原理课的作业做了一个OpenCV+汇编51的没啥用的跳一跳物理外挂,觉得可以换成用深度学习进行目标检测,于是就来试一试
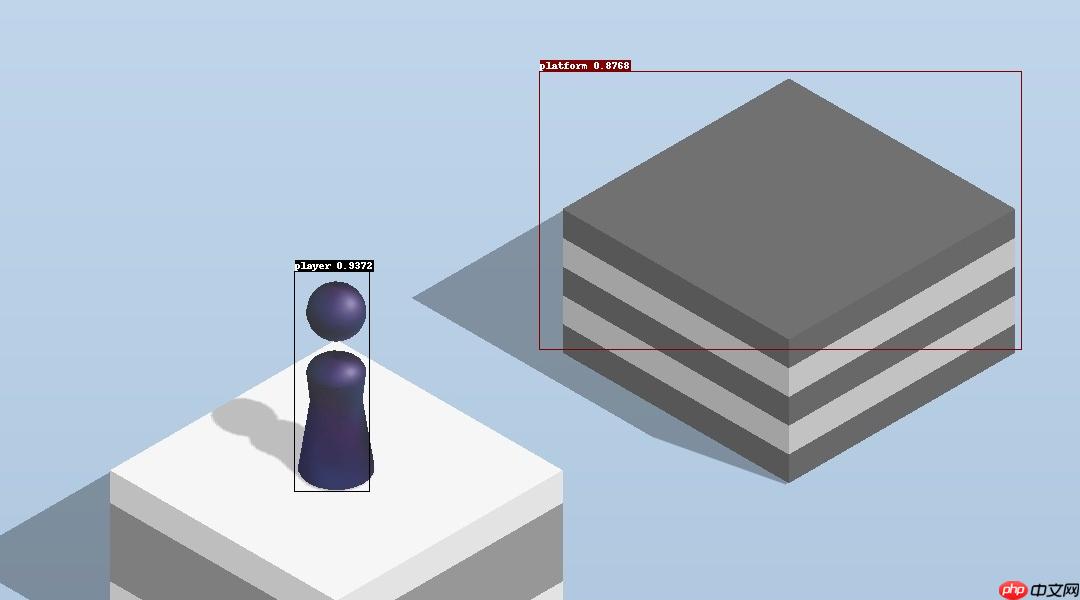
效果图:
效果动图:

一、准备工作
1. 准备PaddleDetection
In [ ]
#安装PaddleDetection!git clone https://gitee.com/paddlepaddle/PaddleDetection.git work/PaddleDetection
In [ ]
#安装前置!pip install --upgrade -r work/PaddleDetection/requirements.txt -i https://mirror.baidu.com/pypi/simple
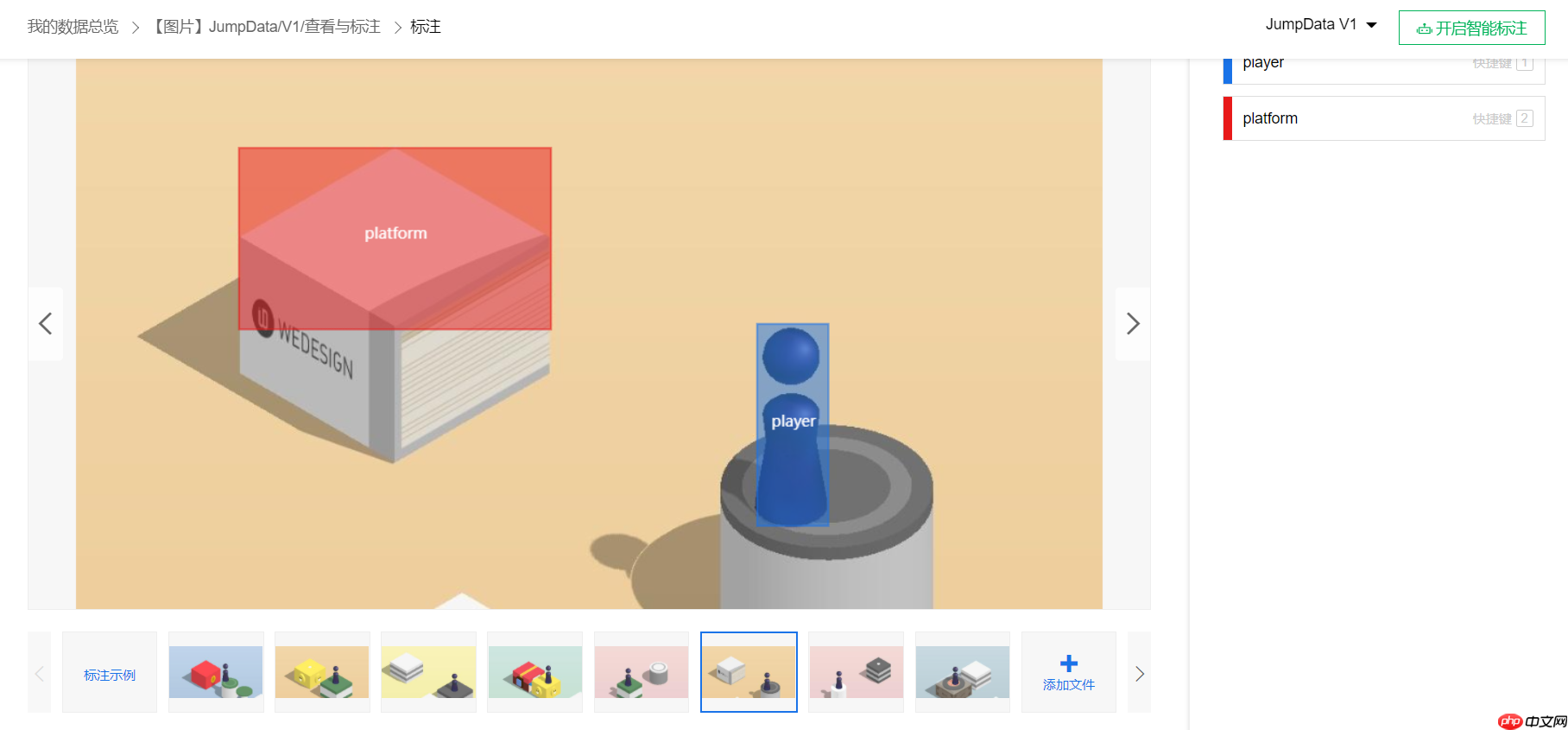
2. 自制数据集
采集199张图片并剪裁(差一张强迫症狂喜(狗头)),使用EasyData平台进行数据标注(他那个智能标注还挺好用的,标完直接传到AIstudio上)

In [ ]
#解压数据集!unzip -q 'data/data109105/JumpData V1.zip' -d data/ !mkdir data/JumpData !mkdir data/JumpData/Image !mkdir data/JumpData/Label !mkdir data/JumpData/Anno !mv data/DatasetId_230079_1631965091/*.json data/JumpData/Label !mv data/DatasetId_230079_1631965091/*.jpg data/JumpData/Image !rm -rf data/DatasetId_230079_1631965091 !rm -rf data/JumpData/Label/screen2.json
转成COCO格式的标注文件(这地方之前搞错了,训练半天精度上不去,后面才发现是我标注文件做错了)
In [ ]
#整理Json文件import osimport json
classlist = [{'supercategory': 'none', 'id': 1, 'name': 'player'},
{'supercategory': 'none', 'id': 2, 'name': 'platform'}]#trainidxcount = 0imgcountidx = 0JumpData_train = {}
imagelist_train = []
labellist_train = []for idx, imagename in enumerate(os.listdir('data/JumpData/Image')[0:179]):
imagelist_train.append({'file_name': imagename, 'height': 600, 'width': 1080, 'id': idx})
jsonname = os.path.splitext(imagename)[0] + '.json'
with open(os.path.join('data/JumpData/Label', jsonname)) as f:
data = json.load(f) for label in data['labels']:
x1 = label['x1']
y1 = label['y1']
w = label['x2'] - label['x1']
h = label['y2'] - label['y1']
area = (w * h) if label['name'] == 'platform':
classidx = 2
else:
classidx = 1
idxcount += 1
labellist_train.append({'area': area,
'iscrowd': 0,
'bbox': [x1, y1, w, h],
'category_id': classidx,
'ignore': 0,
'segmentation': [],
'image_id': imgcountidx,
'id': idxcount})
imgcountidx += 1#validxcount = 0imgcountidx = 0JumpData_val = {}
imagelist_val = []
labellist_val = []for idx, imagename in enumerate(os.listdir('data/JumpData/Image')[179:199]):
imagelist_val.append({'file_name': imagename, 'height': 600, 'width': 1080, 'id': idx})
jsonname = os.path.splitext(imagename)[0] + '.json'
with open(os.path.join('data/JumpData/Label', jsonname)) as f:
data = json.load(f) for label in data['labels']:
x1 = label['x1']
y1 = label['y1']
w = label['x2'] - label['x1']
h = label['y2'] - label['y1']
area = (w * h) if label['name'] == 'platform':
classidx = 2
else:
classidx = 1
idxcount += 1
labellist_val.append({'area': area,
'iscrowd': 0,
'bbox': [x1, y1, w, h],
'category_id': classidx,
'ignore': 0,
'segmentation': [],
'image_id': imgcountidx,
'id': idxcount})
imgcountidx += 1JumpData_train['images'] = imagelist_train
JumpData_train['type'] = 'instances'JumpData_train['annotations'] = labellist_train
JumpData_train['categories'] = classlist
JumpData_val['images'] = imagelist_val
JumpData_val['type'] = 'instances'JumpData_val['annotations'] = labellist_val
JumpData_val['categories'] = classlist
json.dump(JumpData_train, open('data/JumpData/Anno/JumpData_train.json', 'w'), indent=4)
json.dump(JumpData_val, open('data/JumpData/Anno/JumpData_val.json', 'w'), indent=4)二、开始训练
使用PPYOLO_Tiny进行训练,配置文件请见work/Config/Yml文件夹
In [29]
#模型训练!export CUDA_VISIBLE_DEVICES=0!python work/PaddleDetection/tools/train.py \
-c work/Config/Yml/PPYOLO_TINY_JUMP.yml \
--eval三、效果验证
In [31]
#模型预测!python work/PaddleDetection/tools/infer.py \
-c work/Config/Yml/PPYOLO_TINY_JUMP.yml \
-o weights=work/output/PPYOLO_TINY_JUMP/best_model.pdparams \
--infer_img=work/Config/screen.png \
--draw_threshold=0.5 \
--output_dir=work/imgresult四、模型导出
In [ ]
#导出模型!python work/PaddleDetection/tools/export_model.py \
-c work/Config/Yml/PPYOLO_TINY_JUMP.yml \
-o weights=work/output/PPYOLO_TINY_JUMP/best_model.pdparams \
--output_dir=work/inference_modelIn [ ]
#模型预测(导出后)!python work/PaddleDetection/deploy/python/infer.py \
--model_dir=work/inference_model/PPYOLO_TINY_JUMP \
--image_file=work/Config/screen.png \
--output_dir=work/inferenceresult五、模型部署
1. 上位机代码
In [ ]
import osimport cv2import timeimport serialimport paddlefrom Predict import PredictConfig, Detector, predict_imagedef getscreen():
os.system("adb shell rm /sdcard/screen.png")
os.system("del C:\\Users\\Blang\\Desktop\\screen.png")
os.system("adb shell screencap -p /sdcard/screen.png")
os.system("adb pull /sdcard/screen.png C:/Users/Blang/Desktop")
img = cv2.imread('C:/Users/Blang/Desktop/screen.png')
img = img[850:1450, :] return img
def getposition(image_file):
paddle.enable_static()
threshold = 0.5
model_dir = 'inference_model/PPYOLO_TINY_JUMP'
pred_config = PredictConfig(model_dir)
detector = Detector(pred_config, model_dir)
results = predict_image(detector, image_file, threshold) return results
def calculate(results):
player_position = []
platform_position = [] for result in results:
classid = result[0]
xmin = result[2]
ymin = result[3]
xmax = result[4]
ymax = result[5]
w = xmax - xmin
h = ymax - ymin if classid == 0:
player_x = xmin + w / 2
player_y = ymax
player_position.append([player_x, player_y]) else:
platform_x = xmin + w / 2
platform_y = ymax
platform_position.append([platform_x, platform_y]) for player in player_position: for platform in platform_position: if player[1] < platform[1]: continue
else:
player_x = player[0]
player_y = player[1]
platform_x = platform[0]
platform_y = platform[1]
distance = ((platform_x - player_x)**2 + (platform_y - player_y)**2)**0.5
presstime = distance * 1.5 + 200
presstime = presstime * 0.001
return presstimedef sendcommand(presstime):
ser=serial.Serial("COM5", 2400, timeout=5)
result=ser.write(chr(0x32).encode("utf-8"))
time.sleep(presstime)
result=ser.write(chr(0x31).encode("utf-8"))
ser.close()
time.sleep(1)
while True:
img = getscreen()
results = getposition(img)
presstime = calculate(results)
sendcommand(presstime)2. 汇编代码
In [ ]
ORG 0000H
LJMP MAIN
ORG 000BH
LJMP Timer0Interrupt
ORG 0023H
LJMP UARTInterrupt
ORG 0100H
MAIN:
LCALL InitAll
LCALL InitTimer0
LCALL InitUART
LCALL PWM
LJMP MAIN
/***********************************/
InitAll:
MOV R7, #50D
MOV SP, #60H
MOV TMOD, #22H/***********************************/
InitTimer0:
MOV TH0, #0A4H
MOV TL0, #0A4H
SETB EA
SETB ET0
SETB TR0
SETB P3.5
SETB P3.6
RET
PWM:
MOV A, #200D
SUBB A, R1
MOV R2, A
MOV A, R1
MOV R0, A
DELAY:
CJNE R0, #00H, $
CLR P3.5
CLR P3.6
MOV A, R2
MOV R0, A
CJNE R0, #00H, $
SETB P3.5
SETB P3.6
MOV A, R1
MOV R0, A
DJNZ R7, DELAY
RET
Timer0Interrupt:
DEC R0
RETI
/***********************************/
InitUART:
MOV SCON, #50H
MOV TH1, #0F3H
MOV TL1, TH1
MOV PCON, #00H
SETB EA
SETB ES
SETB TR1
RET
UARTInterrupt:
CLR ES
PUSH ACC
JB RI, Is_Receive
RETI
Is_Receive:
CLR RI
MOV A, SBUF
CJNE A, #31H, NEXT_POSITION
MOV R1, #8D NEXT_POSITION:
CJNE A, #32H, GOBACK
MOV R1, #20DGOBACK:
SETB ES
POP ACC
RETI
/***********************************/
END




























