






本文分享结合RealSense深感摄像头与PaddleHub实现目标检测和深度测量的方法。先介绍RealSense的特性及Python调用方式,再说明基于PaddleHub用普通摄像头部署目标检测模型的过程,最后展示整合两者的代码及效果,还提及未来可能分享在其他平台的实现。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

引入
- 最近拿到了一个RealSense深感摄像头
- 本来是想拿来单纯的做一个普通的目标检测的摄像头的
- 然后发现RealSense的深感传感器还不错,好像能用来做深度测量
- 于是就试着做一下能不能同时进行检测和距离测量
- 本次项目就分享一下如何结合PaddleHub和RealSense来进行简单的目标检测和深度测量
效果展示
RealSense
- 俗话说:知己知彼,百战不殆。开始之前先例行的了解一下RealSense是啥?
- RealSense是Intel公司出品的一款深感摄像头
- 顾名思义,它是一款能够感知深度的摄像头,除了能够正常的捕捉RGB图像外,还能额外的获取画面中的深度信息
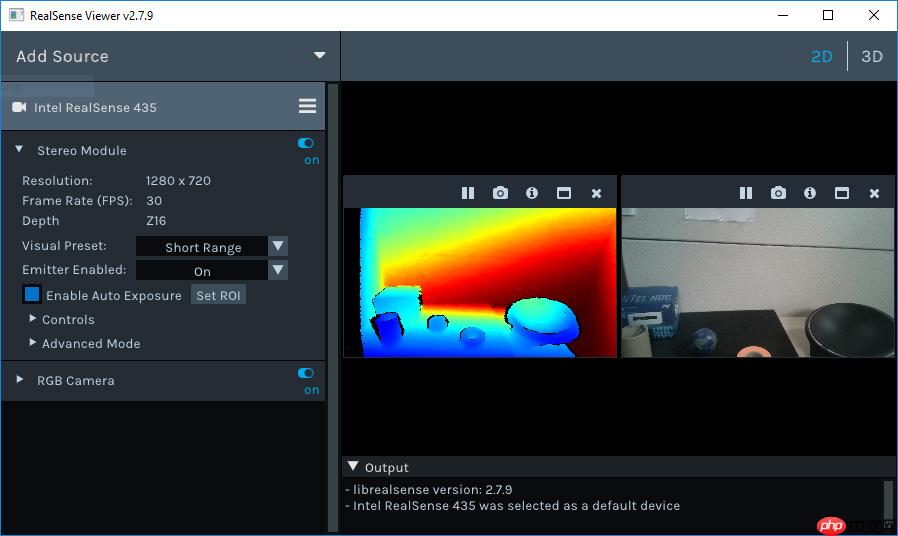
- 获取到的图像如下图所示:
快速使用
- 使用RealSense需要用到其专用的SDK:下载地址
- 在Windows平台安装SDK之后就可以通过RealSense VIewer这个软件快速使用这个摄像头了(就像上面的图片所示的那样)
Python调用
- 当然RealSense也支持使用Python直接调用
- 使用这个方式就能快速的和PaddleDetection的部署代码进行联动
- 简单实现对特定目标进行检测并测量其距离摄像头的距离
- 先通过一个官方的Demo来看一下如何进行调用
# 安装pyrealsense2库$ pip install pyrealsense2
# 导入必要的库import pyrealsense2 as rsimport numpy as npimport cv2# 配置视频流参数pipeline = rs.pipeline()
config = rs.config()
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)# 启动视频流pipeline.start(config)try: while True: # 等待帧读取
frames = pipeline.wait_for_frames()
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame() if not depth_frame or not color_frame: continue
# 转换为Ndarray
depth_image = np.asanyarray(depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data()) # 对深度图进行着色
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET) # 拼接彩色图和深度图
images = np.hstack((color_image, depth_colormap)) # 显示画面
cv2.namedWindow('RealSense', cv2.WINDOW_AUTOSIZE)
cv2.imshow('RealSense', images)
cv2.waitKey(1)finally: # 结束视频流
pipeline.stop()
- 可以看到调用这个摄像头其实还是很简单的
- 大致的效果如下图:

基于PaddleHub目标检测部署
- 先通过一个最简单的例子,使用PaddleHub中的预训练目标检测模型搭配普通摄像头来完成模型部署
# 导入必要的库import cv2import paddlehub as hub# 加载目标检测模型model = hub.Module(name="ssd_mobilenet_v1_pascal")# 启动视频流cap = cv2.VideoCapture(0)while True: # 读取视频帧
success, frame = cap.read() # 进行目标检测,获取检测结果
results = model.object_detection(
images=[frame],
visualization=False
)[0]['data']
# 遍历检测结果,绘制预测框、类别标签和置信度
for result in results:
cv2.rectangle(
frame,
(int(result['left']), int(result['top'])),
(int(result['right']), int(result['bottom'])),
[255, 0, 0], 2)
cv2.putText(
frame,
'%s %.02f' % (result['label'], result['confidence']*100),
(int(result['left']), int(result['top'])),
cv2.FONT_HERSHEY_SIMPLEX,
1.2, (255, 255, 255), 2) # 显示画面
cv2.imshow('Object Detection', frame) # 等待键盘响应
key = cv2.waitKey(1) # 如果按下Esc键,退出程序
if key == 27: break# 释放视频流cap.release()
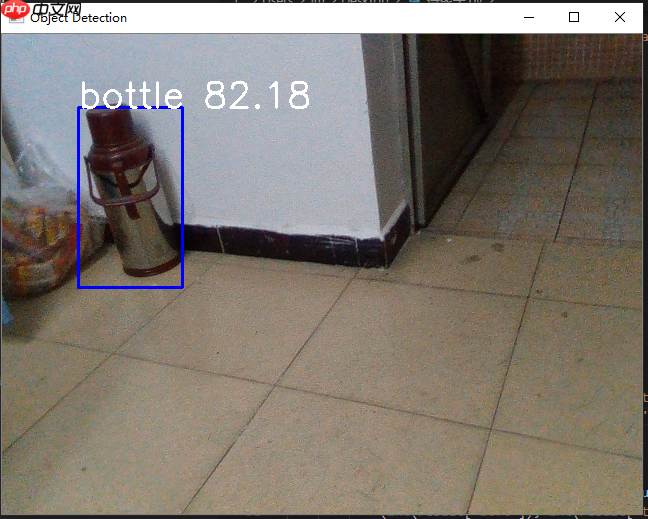
- 效果大致就像下图那样:
基于PaddleHub Demo加入深度检测
- 换上RealSense并加入后处理代码就可以快速实现了,具体代码如下:
# 导入必要的库import paddlehub as hub
import pyrealsense2 as rs
import numpy as np
import cv2#配置视频流参数align_to = rs.stream.color
pipeline = rs.pipeline()
config = rs.config()
alignedFs = rs.align(align_to)
config.enable_stream(rs.stream.depth, 640, 480, rs.format.z16, 30)
config.enable_stream(rs.stream.color, 640, 480, rs.format.bgr8, 30)# 加载目标检测模型model = hub.Module(name="ssd_mobilenet_v1_pascal")# 启动视频流pipeline.start(config)while True: # 读取视频帧
frames = pipeline.wait_for_frames()
frames = alignedFs.process(frames)
depth_frame = frames.get_depth_frame()
color_frame = frames.get_color_frame() # 转换为Ndarray
depth_image = np.asanyarray(depth_frame.get_data())
color_image = np.asanyarray(color_frame.get_data())
depth_colormap = cv2.applyColorMap(cv2.convertScaleAbs(depth_image, alpha=0.03), cv2.COLORMAP_JET) # 进行目标检测,获取检测结果
results = model.object_detection(
images=[color_image],
visualization=False
)[0]['data']
# 遍历检测结果,绘制预测框、类别标签和置信度
for result in results: # 计算中心点
c_x, c_y = int(result['left'] + (result['right'] - result['left']) / 2), int(result['top'] + (result['bottom'] - result['top']) / 2) # 取中心周围的25个点
depths = depth_image[min(0, c_y-2):c_y+3, min(0, c_x-2):c_x+3] # 去除0求平均得到距离
depth = np.sum(depths)/np.sum(depths!=0)
# 预测框、距离、标签和置信度绘制
cv2.rectangle(
color_image,
(int(result['left']), int(result['top'])),
(int(result['right']), int(result['bottom'])),
[255, 0, 0], 2)
cv2.putText(
color_image,
'%s %.02f %.02fm' % (result['label'], result['confidence']*100, depth/1000),
(int(result['left']), int(result['top'])),
cv2.FONT_HERSHEY_SIMPLEX,
1.2, (255, 255, 255), 2)
cv2.rectangle(
depth_colormap,
(int(result['left']), int(result['top'])),
(int(result['right']), int(result['bottom'])),
[255, 0, 0], 2)
cv2.putText(
depth_colormap,
'%s %.02f %.02fm' % (result['label'], result['confidence']*100, depth/1000),
(int(result['left']), int(result['top'])),
cv2.FONT_HERSHEY_SIMPLEX,
1.2, (255, 255, 255), 2) # 拼接画面
images = np.hstack((color_image, depth_colormap))
# 显示画面
cv2.imshow('Object Detection', images) # 等待键盘响应
key = cv2.waitKey(1) # 如果按下Esc键,退出程序
if key == 27:
break# 释放视频流pipeline.stop()
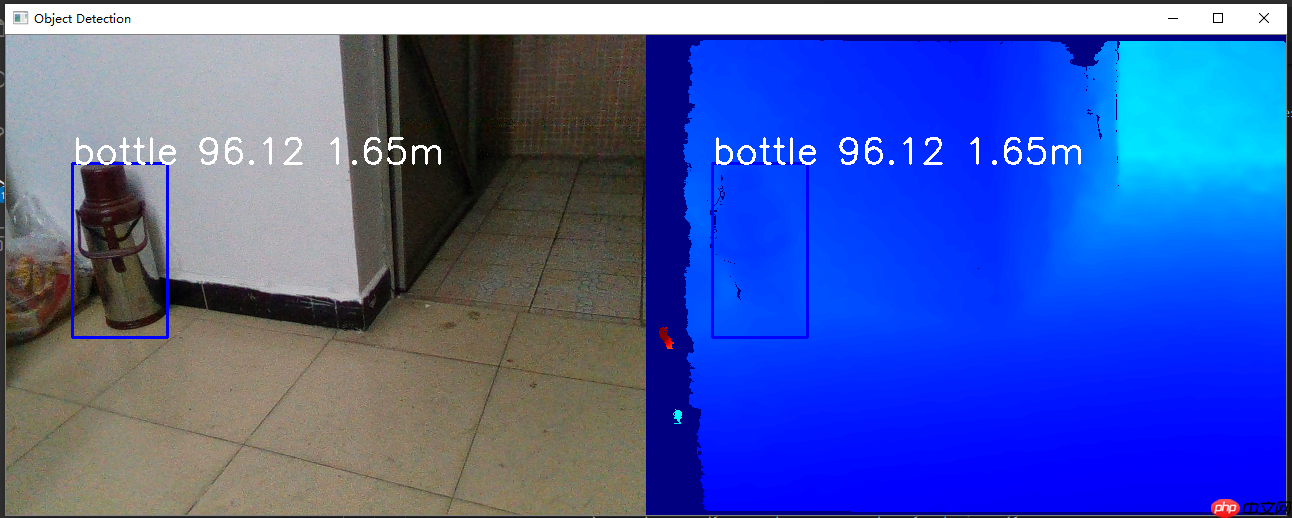
- 大致效果展示:
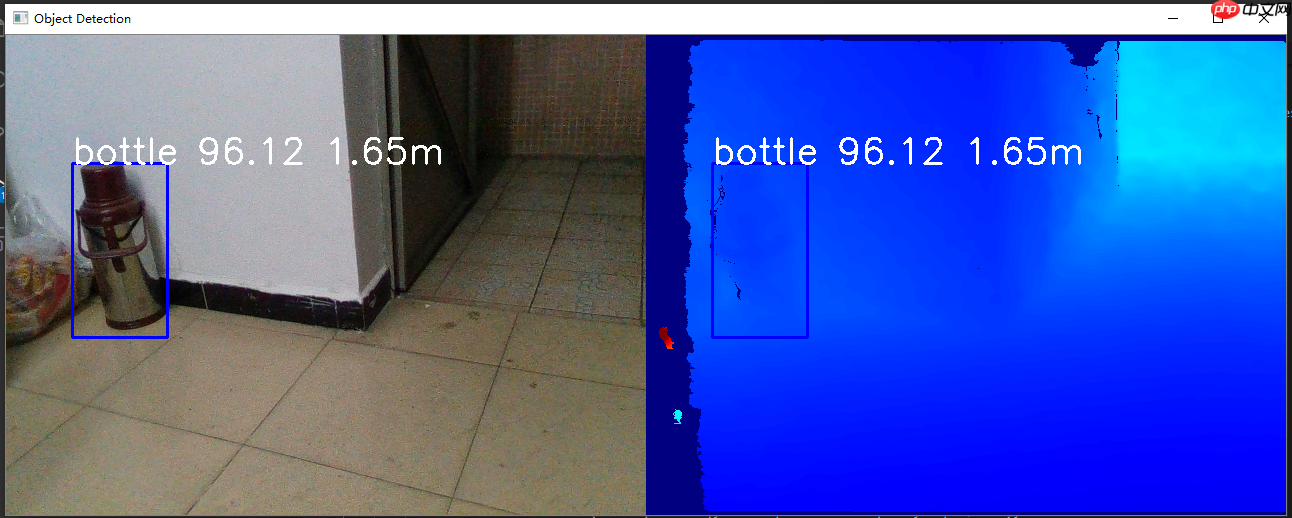
总结
- 这样就简单实现了所需要的目标检测+距离测量的功能
- 当然不只是PaddleHub,使用PaddleDetection也可以实现这样的功能,而且效率更高
- 未来可能会再分享一下如何在Nvidia Jetson/Linux/C++平台上结合PaddleDetection来实现效果更好、效率更优的目标检测+距离测量。




























