






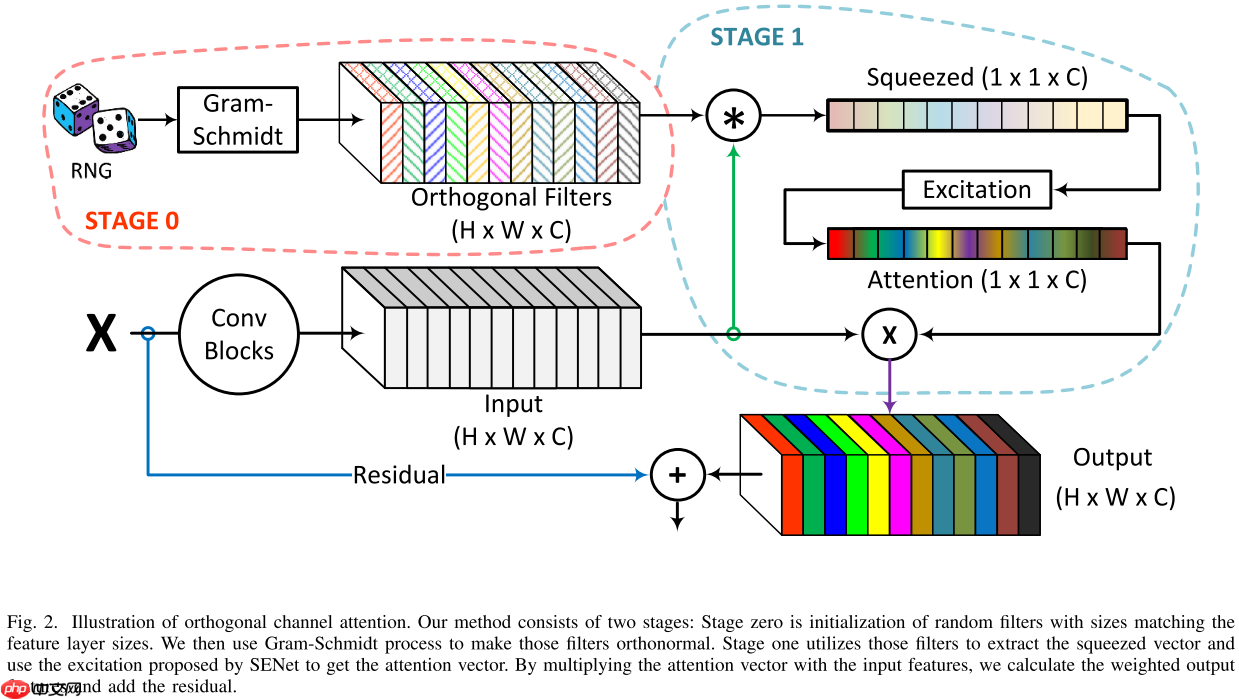
本文提出orthonets正交通道注意力网络,认为fcanet中dct成功源于正交核滤波器。其简化空间压缩,用多个正交核滤波器,再进行类似se的操作。在cifar-10上与resnet-18对比实验,orthonet-18验证精度0.9406,参数11,270,602,性能相当,表明正交核对空间压缩有效。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
OrthoNets:正交通道注意力网络
摘要
设计一种有效的通道注意机制要求人们找到一种用于最佳特征表示的有损压缩方法。尽管该领域最近取得了进展,但它仍然是一个悬而未决的问题。 FcaNet 是当前最先进的通道注意力机制,尝试使用离散余弦变换(DCT)找到这种信息丰富的压缩。 FcaNet 的一个缺点是 DCT 频率没有自然选择。为了解决这个问题,FcaNet 在 ImageNet 上进行了实验以找到最佳频率。我们假设频率的选择仅起辅助作用,而注意力过滤器有效性的主要驱动力是 DCT 内核的正交性。为了检验这个假设,我们使用随机初始化的正交滤波器构建了一个注意力机制。将此机制集成到 ResNet 中,我们创建了 OrthoNet。我们在 Birds、MS-COCO 和 Places356 上将 OrthoNet 与 FcaNet(和其他注意力机制)进行比较,并显示出优越的性能。在 ImageNet 数据集上,我们的方法可以与当前最先进的方法竞争或超越。我们的结果表明,滤波器的最佳选择是难以捉摸的,但是可以通过足够大量的正交滤波器来实现泛化。我们进一步研究了实施通道注意力的其他一般原则,例如其在网络中的位置和通道分组。

2. 代码复现
2.1 下载并导入所需要的包
In [ ]
%matplotlib inlineimport paddleimport numpy as npimport matplotlib.pyplot as pltfrom paddle.vision.datasets import Cifar10from paddle.vision.transforms import Transposefrom paddle.io import Dataset, DataLoaderfrom paddle import nnimport paddle.nn.functional as Fimport paddle.vision.transforms as transformsimport osimport matplotlib.pyplot as pltfrom matplotlib.pyplot import figurefrom paddle import ParamAttrfrom paddle.nn.layer.norm import _BatchNormBaseimport mathfrom OrthoNets import *
2.2 创建数据集
In [3]
train_tfm = transforms.Compose([
transforms.RandomCrop(32, padding=4),
transforms.ColorJitter(brightness=0.2,contrast=0.2, saturation=0.2),
transforms.RandomHorizontalFlip(0.5),
transforms.RandomRotation(20),
transforms.ToTensor(),
transforms.Normalize(mean=(0.5, 0.5, 0.5), std=(0.5, 0.5, 0.5)),
])
test_tfm = transforms.Compose([
transforms.Resize((32, 32)),
transforms.ToTensor(),
transforms.Normalize(mean=(0.5, 0.5, 0.5), std=(0.5, 0.5, 0.5)),
])
In [4]
paddle.vision.set_image_backend('cv2')# 使用Cifar10数据集train_dataset = Cifar10(data_file='data/data152754/cifar-10-python.tar.gz', mode='train', transform = train_tfm, )
val_dataset = Cifar10(data_file='data/data152754/cifar-10-python.tar.gz', mode='test',transform = test_tfm)print("train_dataset: %d" % len(train_dataset))print("val_dataset: %d" % len(val_dataset))
train_dataset: 50000 val_dataset: 10000
In [5]
batch_size=256
In [6]
train_loader = DataLoader(train_dataset, batch_size=batch_size, shuffle=True, drop_last=True, num_workers=4) val_loader = DataLoader(val_dataset, batch_size=batch_size, shuffle=False, drop_last=False, num_workers=4)
2.3 标签平滑
In [7]
class LabelSmoothingCrossEntropy(nn.Layer):
def __init__(self, smoothing=0.1):
super().__init__()
self.smoothing = smoothing def forward(self, pred, target):
confidence = 1. - self.smoothing
log_probs = F.log_softmax(pred, axis=-1)
idx = paddle.stack([paddle.arange(log_probs.shape[0]), target], axis=1)
nll_loss = paddle.gather_nd(-log_probs, index=idx)
smooth_loss = paddle.mean(-log_probs, axis=-1)
loss = confidence * nll_loss + self.smoothing * smooth_loss return loss.mean()
2.4 OrthoNets
In [ ]
model = orthonet18(n_classes=10) paddle.summary(model, (1, 3, 32, 32))

2.5 训练
In [9]
learning_rate = 0.1n_epochs = 100paddle.seed(42) np.random.seed(42)
In [ ]
work_path = 'work/model'model = orthonet18(n_classes=10)
criterion = LabelSmoothingCrossEntropy()
scheduler = paddle.optimizer.lr.MultiStepDecay(learning_rate, milestones=[30, 60, 90])
optimizer = paddle.optimizer.Momentum(parameters=model.parameters(), learning_rate=scheduler, weight_decay=5e-4)
gate = 0.0threshold = 0.0best_acc = 0.0val_acc = 0.0loss_record = {'train': {'loss': [], 'iter': []}, 'val': {'loss': [], 'iter': []}} # for recording lossacc_record = {'train': {'acc': [], 'iter': []}, 'val': {'acc': [], 'iter': []}} # for recording accuracyloss_iter = 0acc_iter = 0for epoch in range(n_epochs): # ---------- Training ----------
model.train()
train_num = 0.0
train_loss = 0.0
val_num = 0.0
val_loss = 0.0
accuracy_manager = paddle.metric.Accuracy()
val_accuracy_manager = paddle.metric.Accuracy() print("#===epoch: {}, lr={:.10f}===#".format(epoch, optimizer.get_lr())) for batch_id, data in enumerate(train_loader):
x_data, y_data = data
labels = paddle.unsqueeze(y_data, axis=1)
logits = model(x_data)
loss = criterion(logits, y_data)
acc = accuracy_manager.compute(logits, labels)
accuracy_manager.update(acc) if batch_id % 10 == 0:
loss_record['train']['loss'].append(loss.numpy())
loss_record['train']['iter'].append(loss_iter)
loss_iter += 1
loss.backward()
optimizer.step()
optimizer.clear_grad()
train_loss += loss
train_num += len(y_data)
scheduler.step()
total_train_loss = (train_loss / train_num) * batch_size
train_acc = accuracy_manager.accumulate()
acc_record['train']['acc'].append(train_acc)
acc_record['train']['iter'].append(acc_iter)
acc_iter += 1
# Print the information.
print("#===epoch: {}, train loss is: {}, train acc is: {:2.2f}%===#".format(epoch, total_train_loss.numpy(), train_acc*100)) # ---------- Validation ----------
model.eval() for batch_id, data in enumerate(val_loader):
x_data, y_data = data
labels = paddle.unsqueeze(y_data, axis=1) with paddle.no_grad():
logits = model(x_data)
loss = criterion(logits, y_data)
acc = val_accuracy_manager.compute(logits, labels)
val_accuracy_manager.update(acc)
val_loss += loss
val_num += len(y_data)
total_val_loss = (val_loss / val_num) * batch_size
loss_record['val']['loss'].append(total_val_loss.numpy())
loss_record['val']['iter'].append(loss_iter)
val_acc = val_accuracy_manager.accumulate()
acc_record['val']['acc'].append(val_acc)
acc_record['val']['iter'].append(acc_iter)
print("#===epoch: {}, val loss is: {}, val acc is: {:2.2f}%===#".format(epoch, total_val_loss.numpy(), val_acc*100)) # ===================save====================
if val_acc > best_acc:
best_acc = val_acc
paddle.save(model.state_dict(), os.path.join(work_path, 'best_model.pdparams'))
paddle.save(optimizer.state_dict(), os.path.join(work_path, 'best_optimizer.pdopt'))print(best_acc)
paddle.save(model.state_dict(), os.path.join(work_path, 'final_model.pdparams'))
paddle.save(optimizer.state_dict(), os.path.join(work_path, 'final_optimizer.pdopt'))
2.6 实验结果
In [11]
def plot_learning_curve(record, title='loss', ylabel='CE Loss'):
''' Plot learning curve of your CNN '''
maxtrain = max(map(float, record['train'][title]))
maxval = max(map(float, record['val'][title]))
ymax = max(maxtrain, maxval) * 1.1
mintrain = min(map(float, record['train'][title]))
minval = min(map(float, record['val'][title]))
ymin = min(mintrain, minval) * 0.9
total_steps = len(record['train'][title])
x_1 = list(map(int, record['train']['iter']))
x_2 = list(map(int, record['val']['iter']))
figure(figsize=(10, 6))
plt.plot(x_1, record['train'][title], c='tab:red', label='train')
plt.plot(x_2, record['val'][title], c='tab:cyan', label='val')
plt.ylim(ymin, ymax)
plt.xlabel('Training steps')
plt.ylabel(ylabel)
plt.title('Learning curve of {}'.format(title))
plt.legend()
plt.show()
In [12]
plot_learning_curve(loss_record, title='loss', ylabel='CE Loss')
<Figure size 1000x600 with 1 Axes>
In [13]
plot_learning_curve(acc_record, title='acc', ylabel='Accuracy')
<Figure size 1000x600 with 1 Axes>
In [14]
import time
work_path = 'work/model'model = orthonet18(n_classes=10)
model_state_dict = paddle.load(os.path.join(work_path, 'best_model.pdparams'))
model.set_state_dict(model_state_dict)
model.eval()
aa = time.time()for batch_id, data in enumerate(val_loader):
x_data, y_data = data
labels = paddle.unsqueeze(y_data, axis=1) with paddle.no_grad():
logits = model(x_data)
bb = time.time()print("Throughout:{}".format(int(len(val_dataset)//(bb - aa))))
Throughout:2214
3. ResNet
3.1 ResNet
In [ ]
model = paddle.vision.models.resnet18(num_classes=10) model.conv1 = nn.Conv2D(3, 64, 3, padding=1, bias_attr=False) model.maxpool = nn.Identity() paddle.summary(model, (1, 3, 32, 32))

3.2 训练
In [16]
learning_rate = 0.1n_epochs = 100paddle.seed(42) np.random.seed(42)
In [ ]
work_path = 'work/model1'model = paddle.vision.models.resnet18(num_classes=10)
model.conv1 = nn.Conv2D(3, 64, 3, padding=1, bias_attr=False)
model.maxpool = nn.Identity()
criterion = LabelSmoothingCrossEntropy()
scheduler = paddle.optimizer.lr.MultiStepDecay(learning_rate, milestones=[30, 60, 90])
optimizer = paddle.optimizer.Momentum(parameters=model.parameters(), learning_rate=scheduler, weight_decay=5e-4)
gate = 0.0threshold = 0.0best_acc = 0.0val_acc = 0.0loss_record1 = {'train': {'loss': [], 'iter': []}, 'val': {'loss': [], 'iter': []}} # for recording lossacc_record1 = {'train': {'acc': [], 'iter': []}, 'val': {'acc': [], 'iter': []}} # for recording accuracyloss_iter = 0acc_iter = 0for epoch in range(n_epochs): # ---------- Training ----------
model.train()
train_num = 0.0
train_loss = 0.0
val_num = 0.0
val_loss = 0.0
accuracy_manager = paddle.metric.Accuracy()
val_accuracy_manager = paddle.metric.Accuracy() print("#===epoch: {}, lr={:.10f}===#".format(epoch, optimizer.get_lr())) for batch_id, data in enumerate(train_loader):
x_data, y_data = data
labels = paddle.unsqueeze(y_data, axis=1)
logits = model(x_data)
loss = criterion(logits, y_data)
acc = accuracy_manager.compute(logits, labels)
accuracy_manager.update(acc) if batch_id % 10 == 0:
loss_record1['train']['loss'].append(loss.numpy())
loss_record1['train']['iter'].append(loss_iter)
loss_iter += 1
loss.backward()
optimizer.step()
optimizer.clear_grad()
train_loss += loss
train_num += len(y_data)
scheduler.step()
total_train_loss = (train_loss / train_num) * batch_size
train_acc = accuracy_manager.accumulate()
acc_record1['train']['acc'].append(train_acc)
acc_record1['train']['iter'].append(acc_iter)
acc_iter += 1
# Print the information.
print("#===epoch: {}, train loss is: {}, train acc is: {:2.2f}%===#".format(epoch, total_train_loss.numpy(), train_acc*100)) # ---------- Validation ----------
model.eval() for batch_id, data in enumerate(val_loader):
x_data, y_data = data
labels = paddle.unsqueeze(y_data, axis=1) with paddle.no_grad():
logits = model(x_data)
loss = criterion(logits, y_data)
acc = val_accuracy_manager.compute(logits, labels)
val_accuracy_manager.update(acc)
val_loss += loss
val_num += len(y_data)
total_val_loss = (val_loss / val_num) * batch_size
loss_record1['val']['loss'].append(total_val_loss.numpy())
loss_record1['val']['iter'].append(loss_iter)
val_acc = val_accuracy_manager.accumulate()
acc_record1['val']['acc'].append(val_acc)
acc_record1['val']['iter'].append(acc_iter)
print("#===epoch: {}, val loss is: {}, val acc is: {:2.2f}%===#".format(epoch, total_val_loss.numpy(), val_acc*100)) # ===================save====================
if val_acc > best_acc:
best_acc = val_acc
paddle.save(model.state_dict(), os.path.join(work_path, 'best_model.pdparams'))
paddle.save(optimizer.state_dict(), os.path.join(work_path, 'best_optimizer.pdopt'))print(best_acc)
paddle.save(model.state_dict(), os.path.join(work_path, 'final_model.pdparams'))
paddle.save(optimizer.state_dict(), os.path.join(work_path, 'final_optimizer.pdopt'))
3.3 实验结果
In [18]
plot_learning_curve(loss_record1, title='loss', ylabel='CE Loss')
<Figure size 1000x600 with 1 Axes>
In [19]
plot_learning_curve(acc_record1, title='acc', ylabel='Accuracy')
<Figure size 1000x600 with 1 Axes>
In [20]
##### import timework_path = 'work/model1'model = paddle.vision.models.resnet18(num_classes=10)
model.conv1 = nn.Conv2D(3, 64, 3, padding=1, bias_attr=False)
model.maxpool = nn.Identity()
model_state_dict = paddle.load(os.path.join(work_path, 'best_model.pdparams'))
model.set_state_dict(model_state_dict)
model.eval()
aa = time.time()for batch_id, data in enumerate(val_loader):
x_data, y_data = data
labels = paddle.unsqueeze(y_data, axis=1) with paddle.no_grad():
logits = model(x_data)
bb = time.time()print("Throughout:{}".format(int(len(val_dataset)//(bb - aa))))
Throughout:2232
4. 对比实验结果
| Model | Val Acc | Parameter |
|---|---|---|
| OrthoNet-18 | 0.9406 | 11,270,602 |
| ResNet-18 | 0.9409 | 11,183,562 |
总结
本文发现正交核对空间压缩和获得良好的全局表示非常有用,因此本文使用正交核来替换GAP操作,取得了不错的性能。(可能CIFAR-10太简单了,性能没啥提高,后续可以换CIFAR-100等数据集试试)




























