


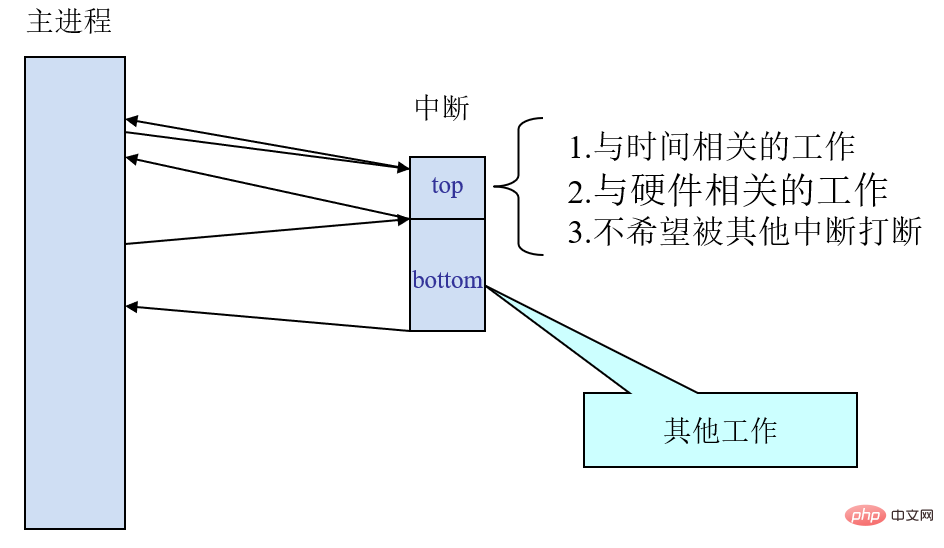
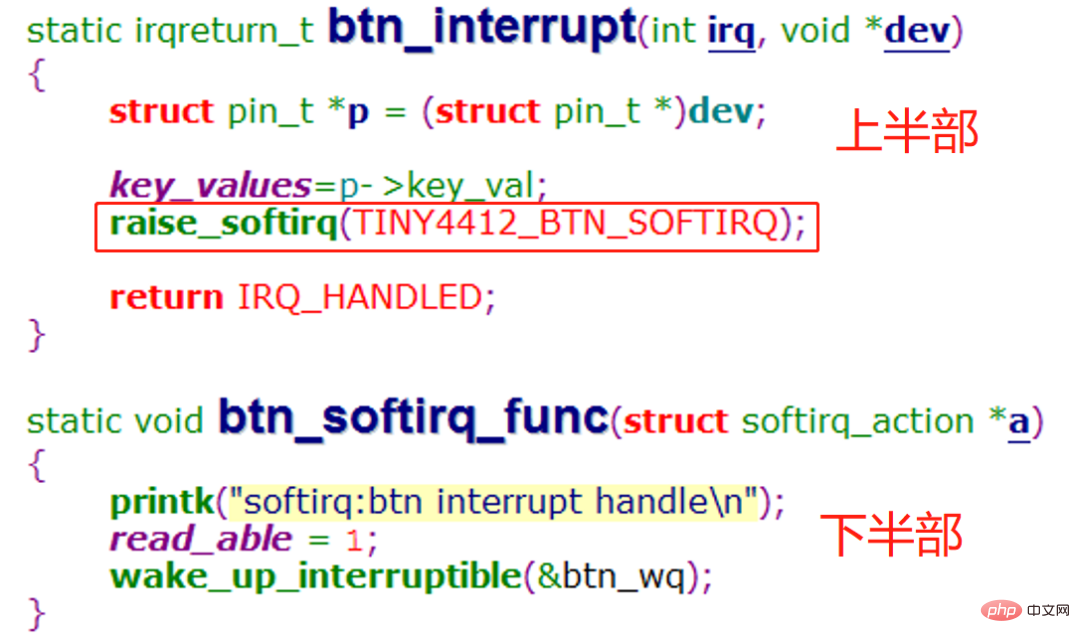
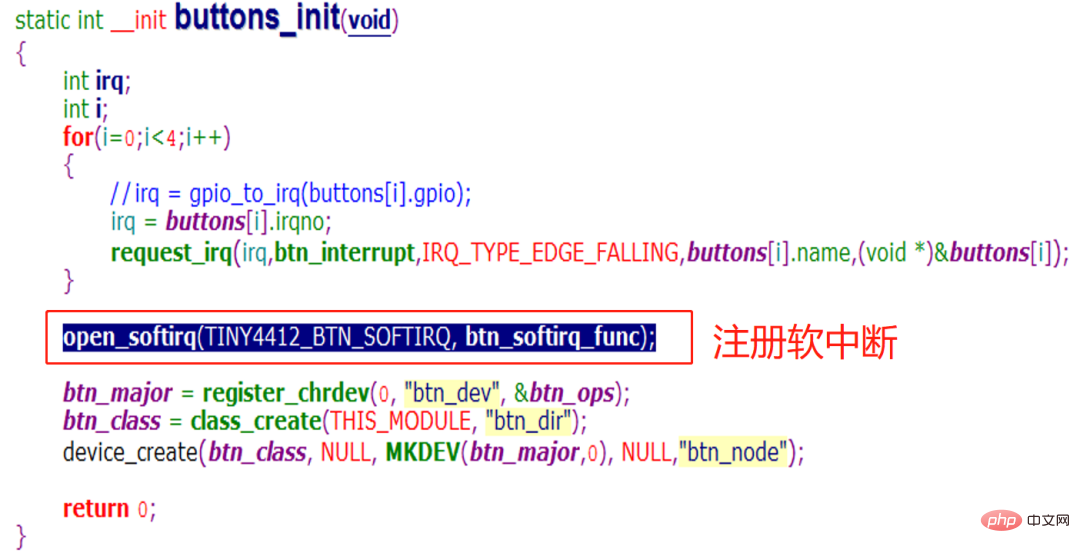
当产生一个中断时,会进入中断处理程序。 但中断处理程序必须快速、异步、简单的对硬件做出迅速响应并完成那些时间要求很严格的操作。 因此,对于那些其他的、对时间要求相对宽松的任务,就应该推后到中断被激活以后再去运行。 这样,整个中断处理流程就被分为了两个部分: 下半部的任务主要是执行与中断相关的工作,这些工作没有被中断服务程序本身完成。 下半部并不需要指明一个确切时间,只要把这些任务推迟一点,让它们在系统不太繁忙并且中断恢复后执行就可以了。 上半部和下半部的主要区别: 上半部指的是中断处理程序,下半部则指的是一些虽然与中断有相关性但是可以延后执行的任务。 上半部中断不能被相同类型的中断打断,而下半部依然可以被中断打断。 通常下半部在中断处理程序一返回就会马上运行。 上半部分简单快速,执行的时候禁止一些或者全部中断。 下半部分稍后执行,而且执行期间可以响应所有的中断。 每个软中断由 在 数组的成员数由 新增一个软中断时,需要在文件 软中断使用的几个要点: 相关接口 即注册对应类型的处理函数到全局数组 实际上即以软中断类型 这也是同一类型软中断可以在多个 以一个按键驱动的中断处理为例,将按键驱动的中断处理分成上下两部分: 软中断的注册,在驱动的入口函数,注册软中断: 添加的枚举常量: 可以看到,使用软中断是需要修改内核,添加一个枚举的,有些繁琐。 所以,通常我们不建议擅自增加软中断的数量,如果需要新的软中断,尽可能把它们实现为基于软中断的 tasklet是利用软中断实现的一种下半部机制。 那是用软中断还是 选择到底是用软中断还是 1、编写 2、声明 3、调度 登记 以按键中断驱动为例: 先使用 两个要点: 工作队列的相关接口函数: 在使用上,工作队列与
什么是中断下半部
Linux中,对中断下半部的实现主要有三种:
softirq
softirq即软中断,代码位于kernel/softirq.c文件中;softirq_action结构表示: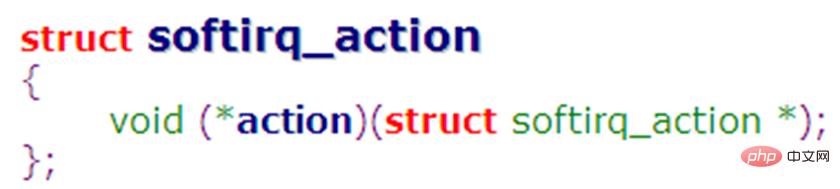
softirq.c中定义了一个软中断向量数组softirq_vec:static struct softirq_action softirq_vec[NR_SOFTIRQS] __cacheline_aligned_in_smp;
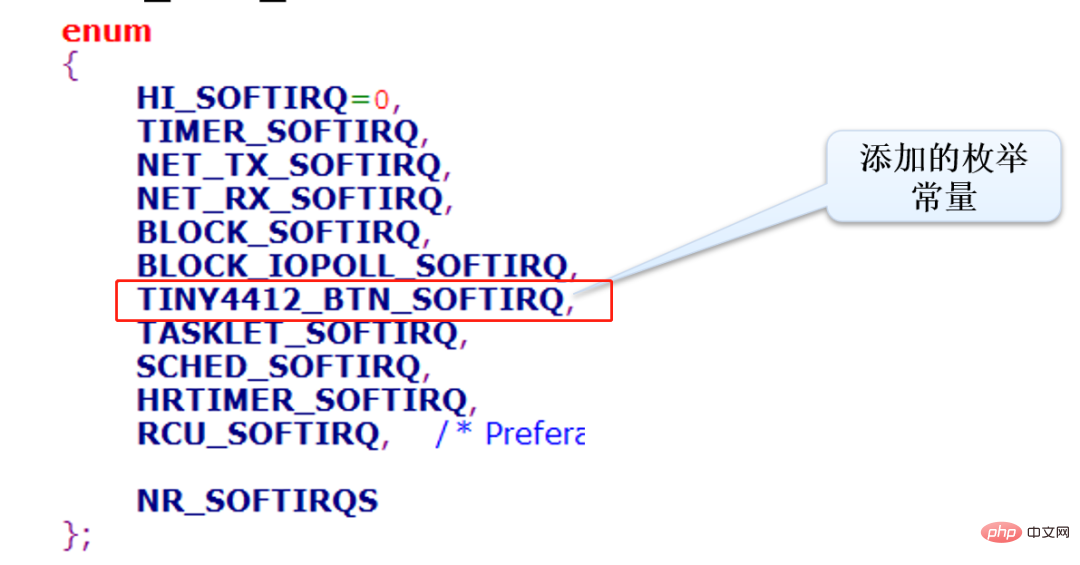
enum
{
HI_SOFTIRQ=0, /*用于高优先级的tasklet*/
TIMER_SOFTIRQ, /*用于定时器的下半部*/
NET_TX_SOFTIRQ, /*用于网络层发包*/
NET_RX_SOFTIRQ, /*用于网络层收报*/
BLOCK_SOFTIRQ,
BLOCK_IOPOLL_SOFTIRQ,
TASKLET_SOFTIRQ, /*用于低优先级的tasklet*/
SCHED_SOFTIRQ,
HRTIMER_SOFTIRQ,
RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq */
NR_SOFTIRQS
};NR_SOFTIRQS决定,是一个枚举常量。include/linux/interrupt.h 中添加一个枚举常量。
void open_softirq(int nr, void (*action)(struct softirq_action *))
softirq_vec中。void raise_softirq(unsigned int nr)
nr作为偏移量会置位irq_stat[cpu_id]的成员变量__softirq_pending.__softirq_pending字段中的每一个bit,对应着某一个软中断,某个bit被置位,说明有相应的软中断等待处理。cpu上并行运行的根本原因。
软中断实例
tasklet形式。
tasklet
tasklet好呢?tasklet其实很简单:
tasklet。就像我们在前面看到的,软中断资源有限,也麻烦,而且软中断的使用者屈指可数。它只在那些执行频率很高和连续性要求很高的情况下才需要。tasklet效果都不错,而且它们还非常容易使用。
tasklet使用
tasklet的使用步骤如下:tasklet处理函数(下半部)void my_tasklet_fun (unsigned long data)
tasklet//静态
DECLARE_TASKLET(my_tasklet,my_tasklet_fun,data);
//动态
Struct tasklet_struct xxx;
tasklet_init(&xxx,tasklet_handler,dev)
tasklettasklet_schedule(&my_tasklet);
my_tasklet, 然后允许系统在合适的时间调度它。
tasklet实例
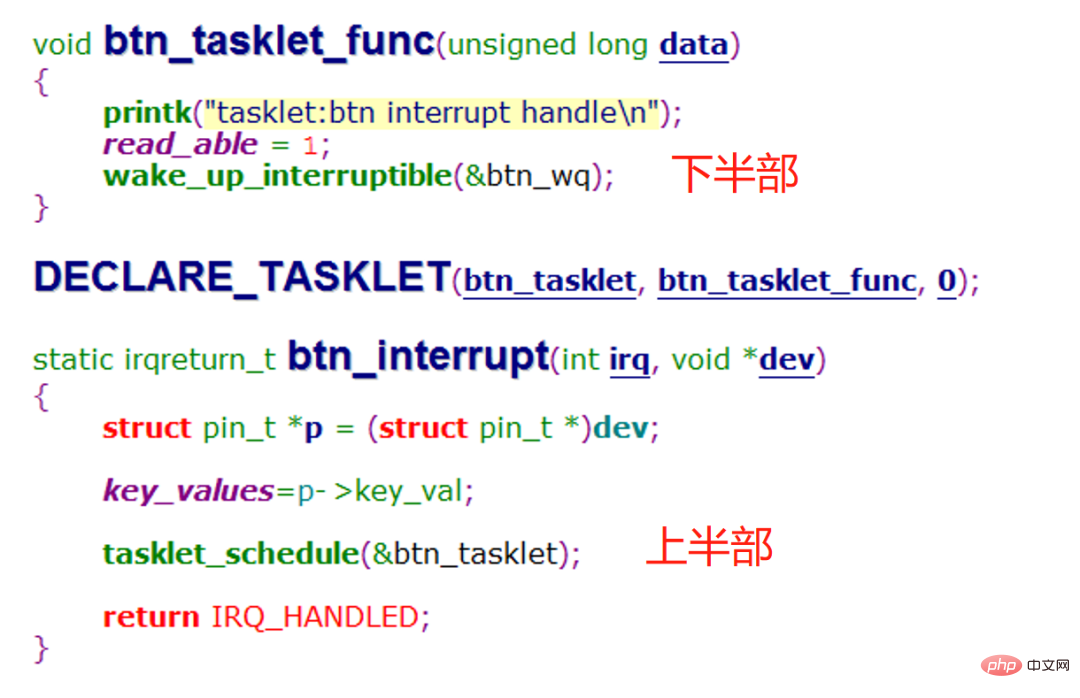
DECLARE_TASKLET静态声明一个tasklet,指定其下半部函数为btn_tasklet_func,在中断服务函数(上半部)获取按键值后,调用tasklet_schedule调度。
work queue
work queue即工作队列,也是中断下半部的一种。Work queue将下半部工作推迟给一个内核线程去执行 ——work 总是运行于进程上下文.
work queues。否则使用softirq或tasklets.Work queues适用于需要分配大量的内存,获得一个信号量,或者执行阻塞的I/O的情况.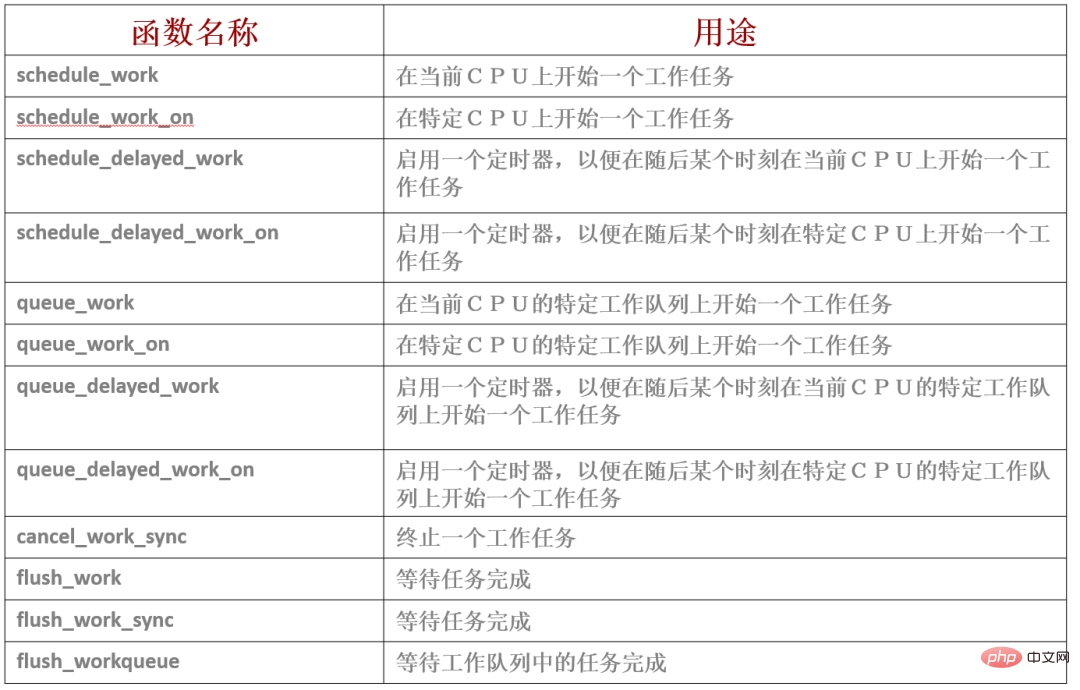
tasklet是类似的: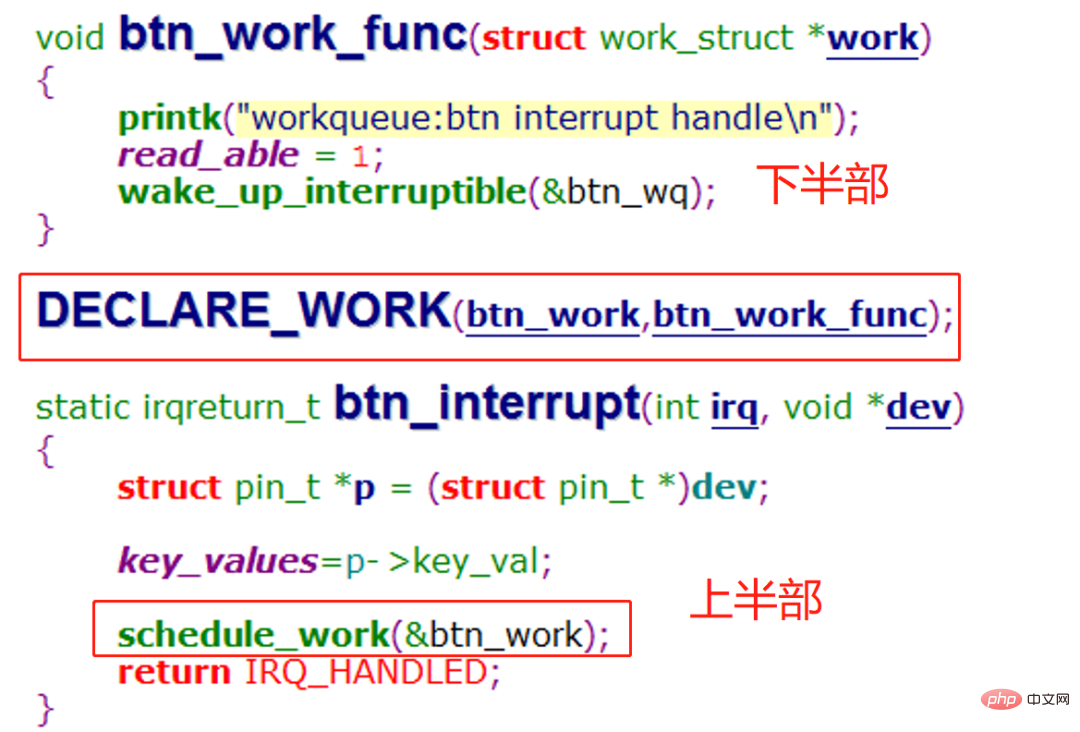


0


0
Linux驱动中断下半部的三种方法
嵌入式Linux充电站
发布时间:2023-07-31 14:57:18
|1343人浏览过
|来源于嵌入式Linux充电站
转载
相关文章
Linux 软件版本升级注意事项
Linux异地备份设计_多机房备份策略
Linux 高可用集群安全与运维实践
Linux OOM Killer 的触发机制与 oom_score_adj 调优最佳实践
Linux服务器响应慢_系统性能全链路排查流程

相关标签:
本站声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系admin@php.cn
热门AI工具









相关专题

本专题围绕 Rust 语言核心特性展开,深入讲解所有权机制、借用规则、生命周期管理以及智能指针等关键概念。通过系统级开发案例,分析内存安全保障原理与零成本抽象优势,并结合并发场景讲解 Send 与 Sync 特性实现机制。帮助开发者真正理解 Rust 的设计哲学,掌握在高性能与安全性并重场景中的工程实践能力。
2
2026.03.05

本专题围绕 PHP 在现代 Web 后端开发中的高性能实践展开,重点讲解基于 Laravel 框架构建可扩展 API 服务的核心方法。内容涵盖路由与中间件机制、服务容器与依赖注入、接口版本管理、缓存策略设计以及队列异步处理方案。同时结合高并发场景,深入分析性能瓶颈定位与优化思路,帮助开发者构建稳定、高效、易维护的 PHP 后端服务体系。
56
2026.03.04

2026最全AI工具安装教程专题:包含各版本AI绘图、AI视频、智能办公软件的本地化部署手册。全篇零基础友好,附带最新模型下载地址、一键安装脚本及常见报错修复方案。每日更新,收藏这一篇就够了,让AI安装不再报错!
30
2026.03.04

本专题聚焦 Swift 在 iOS 应用架构设计中的实践,系统讲解 MVVM 模式的核心思想、数据绑定机制、模块拆分策略以及组件化开发方法。内容涵盖网络层封装、状态管理、依赖注入与性能优化技巧。通过完整项目案例,帮助开发者构建结构清晰、可维护性强的 iOS 应用架构体系。
59
2026.03.03

本专题围绕 C++ 在高性能网络服务开发中的应用展开,深入讲解 Socket 编程、多路复用机制、Reactor 模型设计原理以及线程池协作策略。内容涵盖 epoll 实现机制、内存管理优化、连接管理策略与高并发场景下的性能调优方法。通过构建高并发网络服务器实战案例,帮助开发者掌握 C++ 在底层系统与网络通信领域的核心技术。
25
2026.03.03

Go语言测试体系与代码质量保障聚焦于构建工程级可靠性系统。本专题深入解析Go的测试工具链(如go test)、单元测试、集成测试及端到端测试实践,结合代码覆盖率分析、静态代码扫描(如go vet)和动态分析工具,建立全链路质量监控机制。通过自动化测试框架、持续集成(CI)流水线配置及代码审查规范,实现测试用例管理、缺陷追踪与质量门禁控制,确保代码健壮性与可维护性,为高可靠性工程系统提供质量保障。
79
2026.02.28

Go语言工程化架构设计专注于构建高可维护性、可演进的企业级系统。本专题深入探讨Go项目的目录结构设计、模块划分、依赖管理等核心架构原则,涵盖微服务架构、领域驱动设计(DDD)在Go中的实践应用。通过实战案例解析接口抽象、错误处理、配置管理、日志监控等关键工程化技术,帮助开发者掌握构建稳定、可扩展Go应用的最佳实践方法。
61
2026.02.28

Go语言以其高效的并发模型和优异的性能表现广泛应用于高并发、高性能场景。其运行时机制包括 Goroutine 调度、内存管理、垃圾回收等方面,深入理解这些机制有助于编写更高效稳定的程序。本专题将系统讲解 Golang 的性能分析工具使用、常见性能瓶颈定位及优化策略,并结合实际案例剖析 Go 程序的运行时行为,帮助开发者掌握构建高性能应用的关键技能。
50
2026.02.28

本专题系统讲解 Golang 并发编程模型,从语言级特性出发,深入理解 goroutine、channel 与调度机制。结合工程实践,分析并发设计模式、性能瓶颈与资源控制策略,帮助将并发能力有效转化为稳定、可扩展的系统性能优势。
47
2026.02.27
热门下载
相关下载
精品课程










