







恐怕elon musk做梦都没有想到,今年世界机器人大会,有一家中国企业率先发布通用人形机器人产品,并向市场高调宣布,今年q4完成上市量产。
宇树H1人形机器人行走演示
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

8月15日晚,宇树正式宣布进军通用人形机器人领域,发布旗下首款通用人形机器人产品H1。从已公布的数据来看,H1人形机器人采用轻量化材料设计,整体重量只有47kg,整身拥有19个自由度,行走姿态轻盈稳健,尤为突出的H1腿部关节电机部分,峰值扭矩达到了360N·m,并且配合中空轴线和双编码器,全面对标特斯拉Optimus人形机器人。

▍峰值扭矩360N·m 让H1人形机器人行走大扭矩高功率M107关节电机是关键
对于双足人形机器人而言,要完成基本行走与抓取等常规动作,通常需要30—40台直流伺服电机。同时伺服电机还需要满足体积小,高爆发、高功率以及高密度等特点,国产伺服电机很难达到这种刚性要求。

据宇树研发工程师透露,为适配大负载,高密度,大功率的需要,宇树专门为H1人形机器人设计了扭矩密度更高的M107关节电机。应用在H1人形机器人的两个膝关节上,峰值扭矩达到360N·m,而髋关节电机扭矩则为220N·m,踝关节为45N·m,手臂关节则为75N·m。目前H1关节单元中核心零部件包括伺服电机、减速器、控制器均为宇树自研自产。
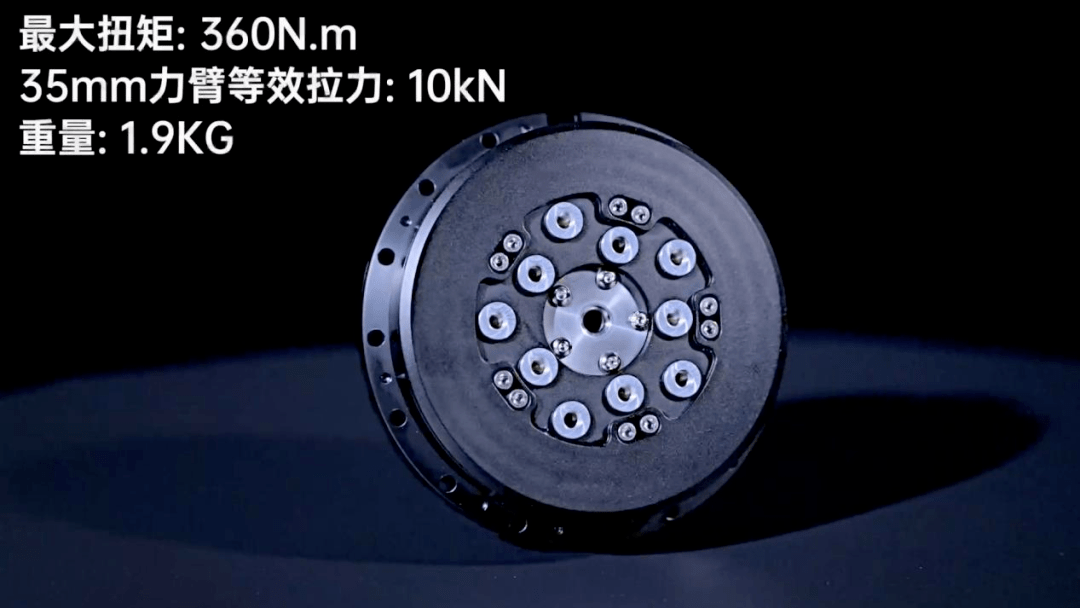
宇树自研大负载,高密度,大功率M107关节电机
得益于M107大功率高密度关节电机加持,H1人形机器人整身拥有19个自由度,其中腿部共有10个自由度,腰部有1个自由度,手臂总共有8个自由度,目前H1人形机器人行走速度可以达到1.5m/s,潜在运动能力可达5m/s。在续航方面,H1人形机器人搭载15Ah电池,最大电压67.2V,可满足连续1小时的运动续航标准。
▍无惧暴力冲击 出色的稳定性与运动控制算法加持 接入AI语言模型

除了在硬件上寻求突破之外,运动控制算法的稳定性与步态规划同样重要,目前H1人形机器人的行走和平衡均是通过自主计算来完成的,没有人为干预介入。视频中我们看到H1人形机器人即便是在受到暴力冲击之后,也能够做到快速调整姿态,保持身体平衡。
H1人形机器人进行侧面抗冲击测试

H1人形机器人背部抗冲击测试

在通用性方面,目前H1人形机器人已搭载3D激光雷达,可以实现自主避障和定位导航功能。除此之外,H1通用人形机器人为手腕和手掌预留了机械和电气接口,提供更多拓展的可能性,而针对手腕和手掌部分,宇树目前也在紧锣密鼓的研制当中,预计Q4会有更多信息公布出来。
H1人形机器人搭载深度相机和3D激光雷达

需要进行改写的内容是:使用实拍深度相机和3D激光雷达

此外宇树研发工程师表示,人形机器人要想走进工厂和普通家庭,就必须解决机器人的通用性问题,提升机器人智能化水平。目前,人形机器人的智能化技术主要集中在机器视觉、语音识别、NLP自然语言处理等方面,虽然能完成简单命令,但在语意理解和逻辑理解能力层面还做得不够好。为此,宇树在H1人形机器人上面也集成了AI大模型,来提升与人类的交互水平。
特斯拉上个月宣布Optimus机器人由于关节执行器产能问题而受到影响,这再次使得人形机器人的核心零部件成为市场关注的焦点。众所周知,执行器是机器人的核心组成部分,它决定了机器人的负荷和精度,具有高价值和强复用性的特点。然而,特斯拉这样备受瞩目的公司却因为缺乏核心硬件制造能力,导致市场对特斯拉Optimus的预期降低

整个人形机器人赛道中,几乎所有头部企业都掌握着人形机器人的核心技术。关节电机、控制器、减速器等核心零部件能否在国内生产并实现批量化,将决定该企业未来的市场潜力。我们在宇树H1人形机器人上看到了一种全新的可能性,一个通用、智能且高度可扩展的人形机器人时代即将到来。这标志着下一场工业革命的开始

























