写在前面
当前自动驾驶系统摆脱对高精度地图依赖的算法之一,是利用远距离范围下的感知表现依然较差的现实依然较差。为此,我们提出了p-mapnet,其中的“p”专注于融合地图先验来提高模型性能。具体来说,我们利用了sdmap和hdmap中的先验信息:一方面,我们从openstreetmap中提取了弱对准的sdmap数据,并将其编码为独立的条款来支持输入。严格修改输入与实际hd+map存在弱对齐的问题,我们基于cross-attention机制的结构能够自适应地关注sdmap骨架,并带来显著的性能提升;另一方面,我们提出了一种使用mae来捕捉hdmap的先验分布的refine模块,该模块有助于生成更符合实际地图的分布,有助于减小遮挡、伪影等影响。我们在nuscenes和argoverse2数据集上进行了广泛的实验验证。
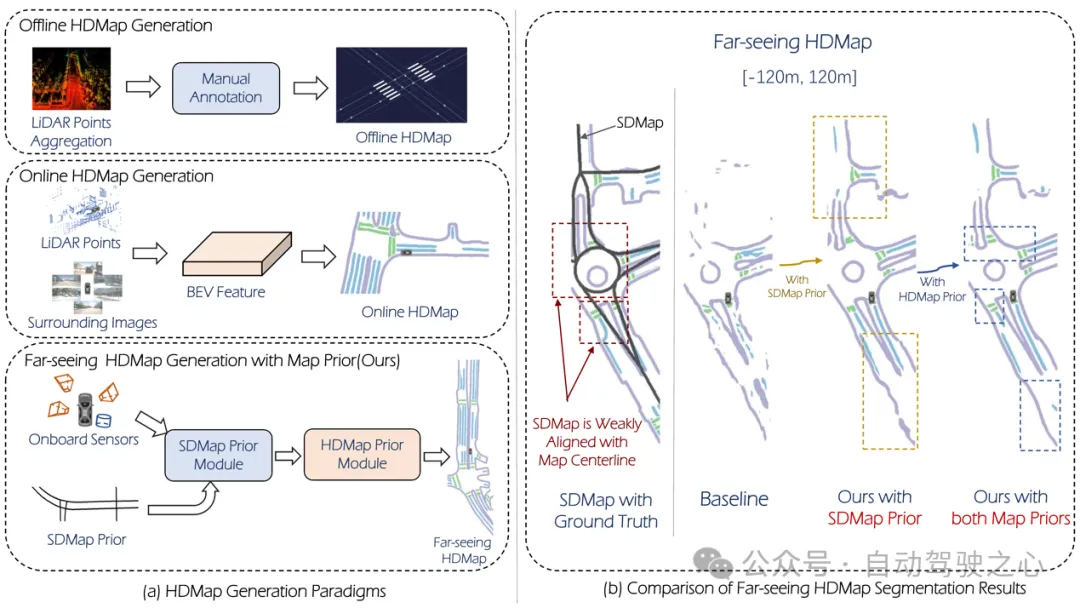 图 1
图 1
总结来说我们的贡献如下:
我们的SDMap先进能够提升在线地图生成性能,包含了栅格化(最多可提高18.73 mIoU)和量化化(最多可提高8.50 mAP)两种地图表现。
(2)我们的HDMap先验能够将地图感知指标提升最多6.34%。
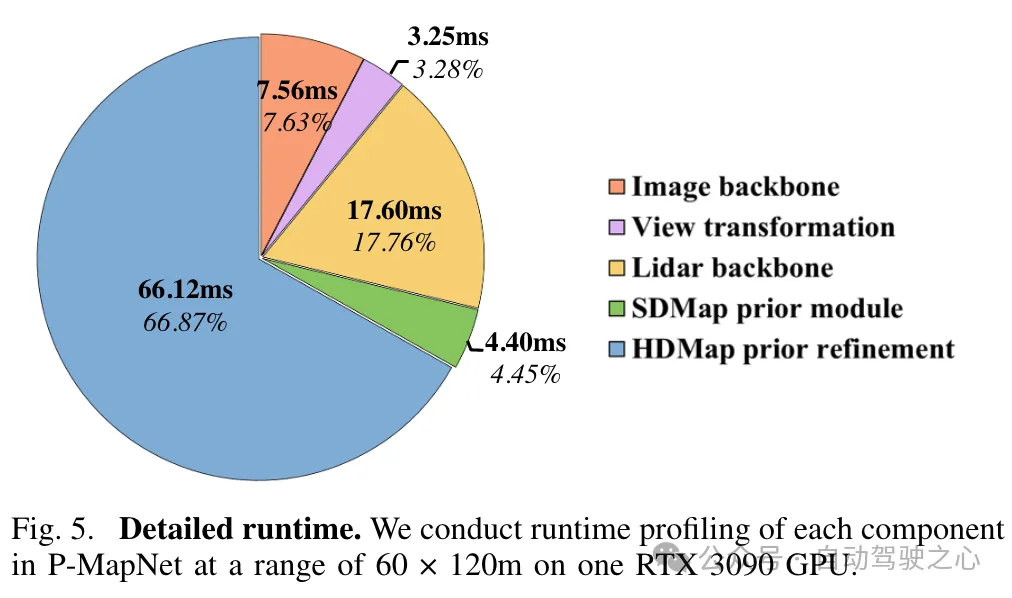
(3)P-MapNet可以切换到不同的推理模式,以在精度和效率之间进行权衡。
P-MapNet是一种远距离HD+Map生成的解决方案,对于较远的感知范围能够带来更大的改进。我们的代码和模型已经公开发布在https://jike5.github.io/P-MapNet/。
相关工作回顾
(1)在线地图生成
HD+Map的制作主要包含SLAM建图、自动标注、人工标注等步骤。这导致了HD+Map的成本高、鲜度有限。因此,在线地图生成对于自动驾驶系统是至关重要的。HDMapNet将地图元素通 过格化化进行表达,使用pixel-wise的预测和后处理方法获得矢量化的预测结果。最近的一些方法,如MapTR、PivotNet、Streammapnet等基于Transformer架构实现了端到端的矢量化预测,但这些方法仅使用传感器输入,在遮挡、极端天气等复杂环境下性能仍有限。
(2)远距离地图感知
为了让在线地图生成的结果能够更好的被下游模块使用,一些研究尝试将地图感知范围进一步拓展。SuperFusion[7]通过融合激光雷达和相机,通过depth-aware BEV变换,实现了前向90m的远距离预测。NeuralMapPrior[8]通过维护和更新全局神经地图先验来增强当前在线观测的质量、拓展感知的范围。[6]通过将卫星图像与车载传感器数据进行特征聚合来获得BEV特征,进一步再进行预测。MV-Map则专注于离线、长距离的地图生成,该方法通过聚合所有关联帧特征,并使用神经辐射场来对BEV特征进行优化。
概述P-MapNet
整体框架如图 2所示。
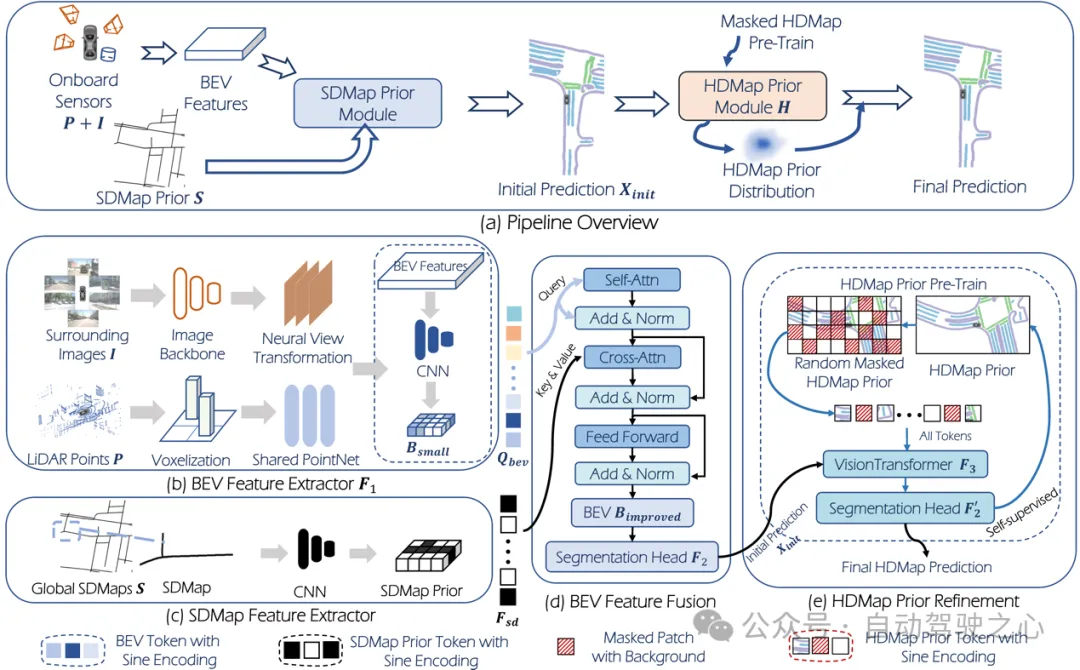 图 2
图 2
输入: 系统输入为点云: 、环视相机:,其中 为环视相机数量。通常的HDMap生成任务(例如HDMapNet)可以定义为:
其中 表示特征提取, 表示segmentation head, 则是HDMap的预测结果。
我们所提出的P-MapNet融合了SD Map和HD Map先验,这种新任务( setting)可以表示为:
其中, 表示SDMap先验, 表示本文所提的refinement模块。 模块通过预训练的方式学习HD Map分布先验。类似的,当只使用SDMap先验时,则得到 -only setting:
输出:对于地图生成任务,通常有两种地图表示形式:栅格化和矢量化。在本文的研究中,由于本文所设计的两个先验模块更适合栅格化输出,因此我们主要集中在栅格化的表示上。
3.1 SDMap Prior 模块
SDMap数据生成

本文基于nuScenes和Argoverse2数据集进行研究,使用OpenStreetMap数据生成以上数据集对应区域的SD Map数据,并通过车辆GPS进行坐标系变换,以获取对应区域的SD Map。
BEV Query
如图2中所示,我们首先分别对图像数据进行特征提取和视角转换、对点云进行特征提取,得到BEV特征。然后将BEV特征通过卷积网络进行下采样后得到新的BEV特征:,将该特征图展平得到BEV Query。
SD Map先验融合
对于SD Map数据,通过卷积网络进行特征提取后,得到的特征 与BEV Query进行Cross-attention机制:
经过交叉注意力机制后得到的BEV特征通过segmentation head可以获得地图元素的初始预测。
3.2、HDMap Prior 模块
直接将栅格化的HD Map作为原始MAE的输入,MAE则会通过MSE Loss进行训练,从而导致无法作为refinement模块。因此在本文中,我们通过将MAE的输出替换为我们的segmentation head。为了让预测的地图元素具有连续性和真实性(与实际HD Map的分布更贴近),我们使用了一个预训练的MAE模块来进行refine。训练该模块包含两步:第一步上使用自监督学习训练MAE模块来学习HD Map的分布,第二步是通过使用第一步得到的权重作为初始权重,对网络的所有模块进行微调。
第一步预训练时,从数据集中获取的真实HD Map经过随机mask后作为网络输入 ,训练目标则为补全HD Map:

第二步fine-tune时, 则使用第一步预训练的权重作为初始权重,完整的网络为:

4、实验
4.1 数据集和指标
我们在两个主流的数据集上进行了评测:nuScenes和Argoverse2。为了证明我们所提方法在远距离上的有效性,我们设置了在三种不同的探测距离:, , 。其中, 范围中BEV Grid的分辨率为0.15m,另外两种范围下分辨率为0.3m。我们使用mIOU指标来评估栅格化预测结果,使用mAP来评估矢量化预测结果。为了评估地图的真实性,我们还使用了LPIPS指标作为地图感知指标。
4.2 结果
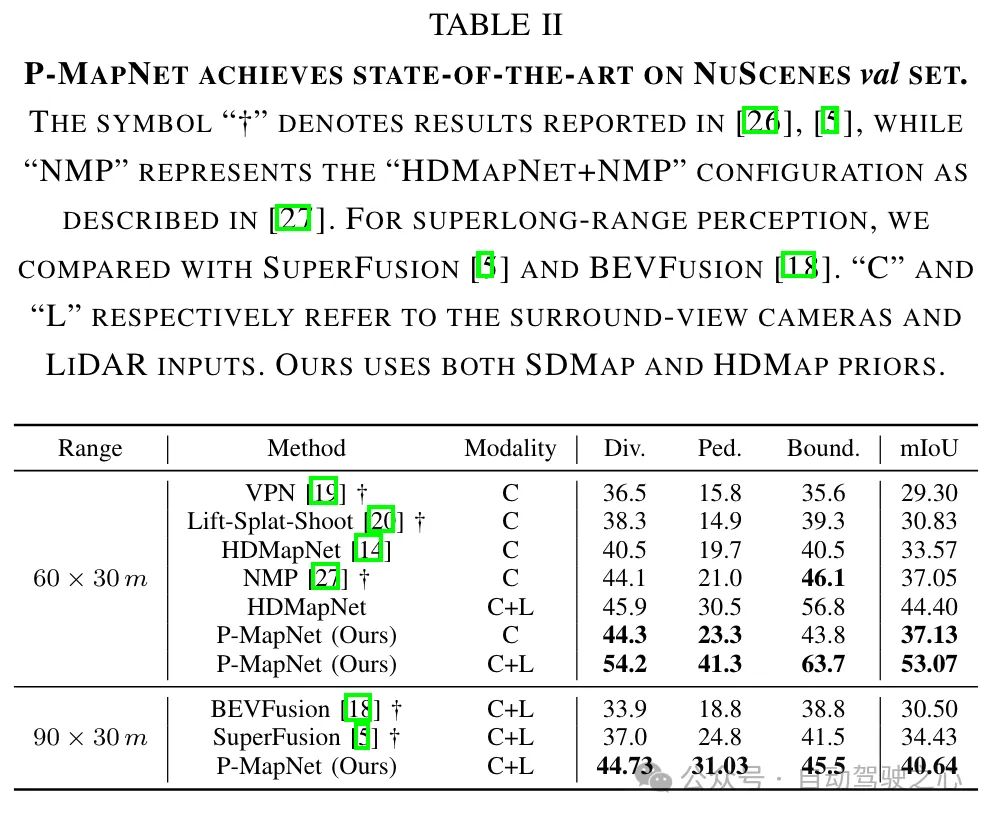
与SOTA结果对比:我们对所提的方法与当前SOTA方法在短距离(60m × 30m)和长距离(90m × 30m)下的地图生成结果进行比较。如表II所示,我们的方法在与现有的仅视觉和多模态(RGB+LiDAR)方法相比表现出更优越的性能。
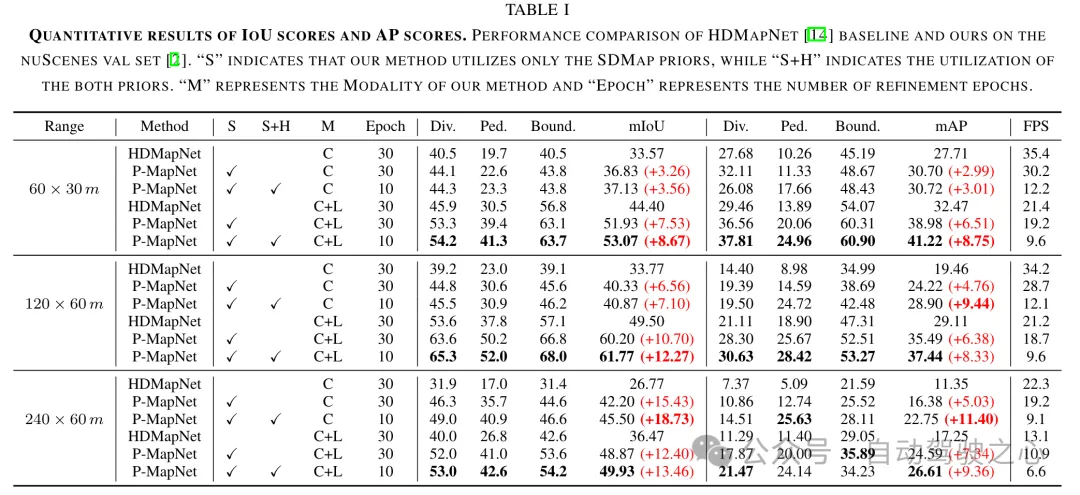
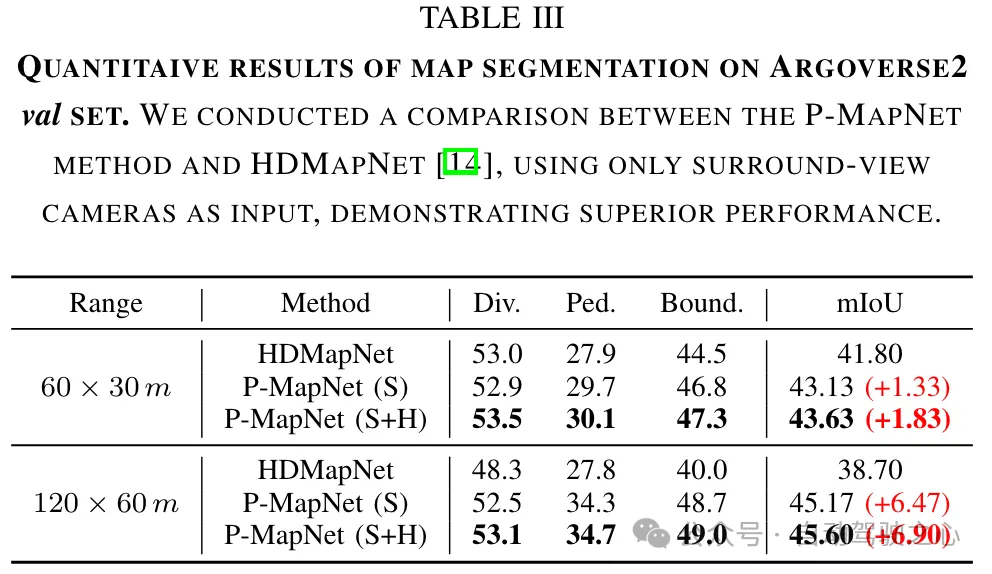
我们在不同距离和使用不同传感器模式下,与HDMapNet [14] 进行了性能比较,结果总结在表I和表III中。我们的方法在240m×60m范围的mIOU上取得了13.4%改进。随着感知距离超出或甚至超过传感器检测范围,SDMap先验的有效性变得更加显著,从而验证了SDMap先验的功效。最后,我们利用HD地图先验通过将初始预测结果精细化以使其更加真实,并消除了错误结果,进一步带来了性能提升。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
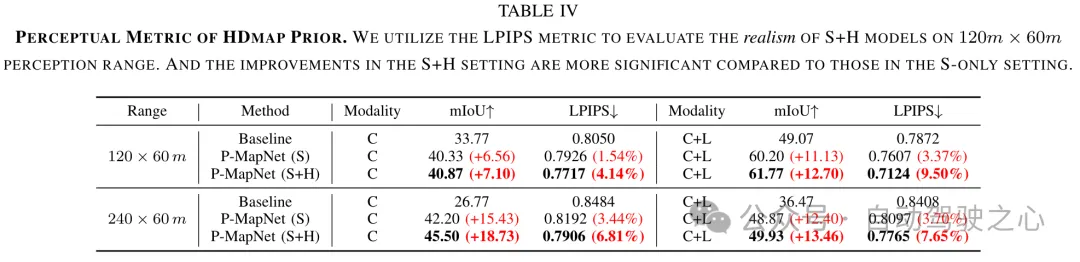
HDMap先验的感知度量指标。HDMap先验模块将网络的初始预测映射到HD地图的分布上,使其更加真实。为了评估HDMap先验模块输出的真实性,我们利用了感知度量LPIPS 数值越低表示性能越好)进行评测。如表IV所示,在 setting 中LPIPS指标要比 -only setting 中的提升更大。
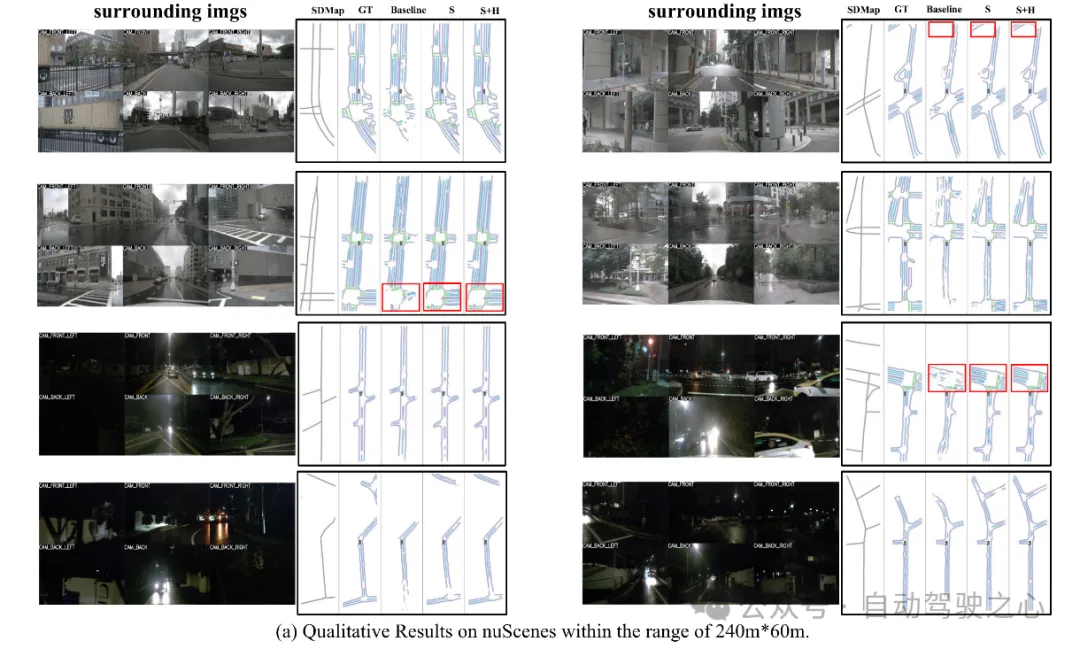
可视化: