







波士顿动力Atlas,正式进入电动机器人时代!
昨天,液压Atlas刚刚「含泪」退出历史舞台,今天波士顿动力就宣布:电动Atlas上岗。
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

看来,在商用人形机器人领域,波士顿动力是下定决心要和特斯拉硬刚一把了。
新视频放出后,短短十几小时内,就已经有一百多万观看。
旧人离去,新角色登场,这是历史的必然。
毫无疑问,今年是人形机器人的爆发年。

网友锐评:机器人的进步,让今年看起来像人类的开幕式
动作、自由度远超人类,但这真不是恐怖片?
视频一开始,Atlas平静地躺在地上,看起来应该是仰面朝天。
接下来,让人惊掉下巴的一幕发生了——
他的双腿以不可思议的角度向后翻折了起来,然后像表演杂技一般双脚着地,把整个身子顶了起来。

当他完全站起来时,应该是背对着我们的,但是紧接着,他的头就像猫头鹰一般原地旋转了180度,整个躯干也跟着转了过来。
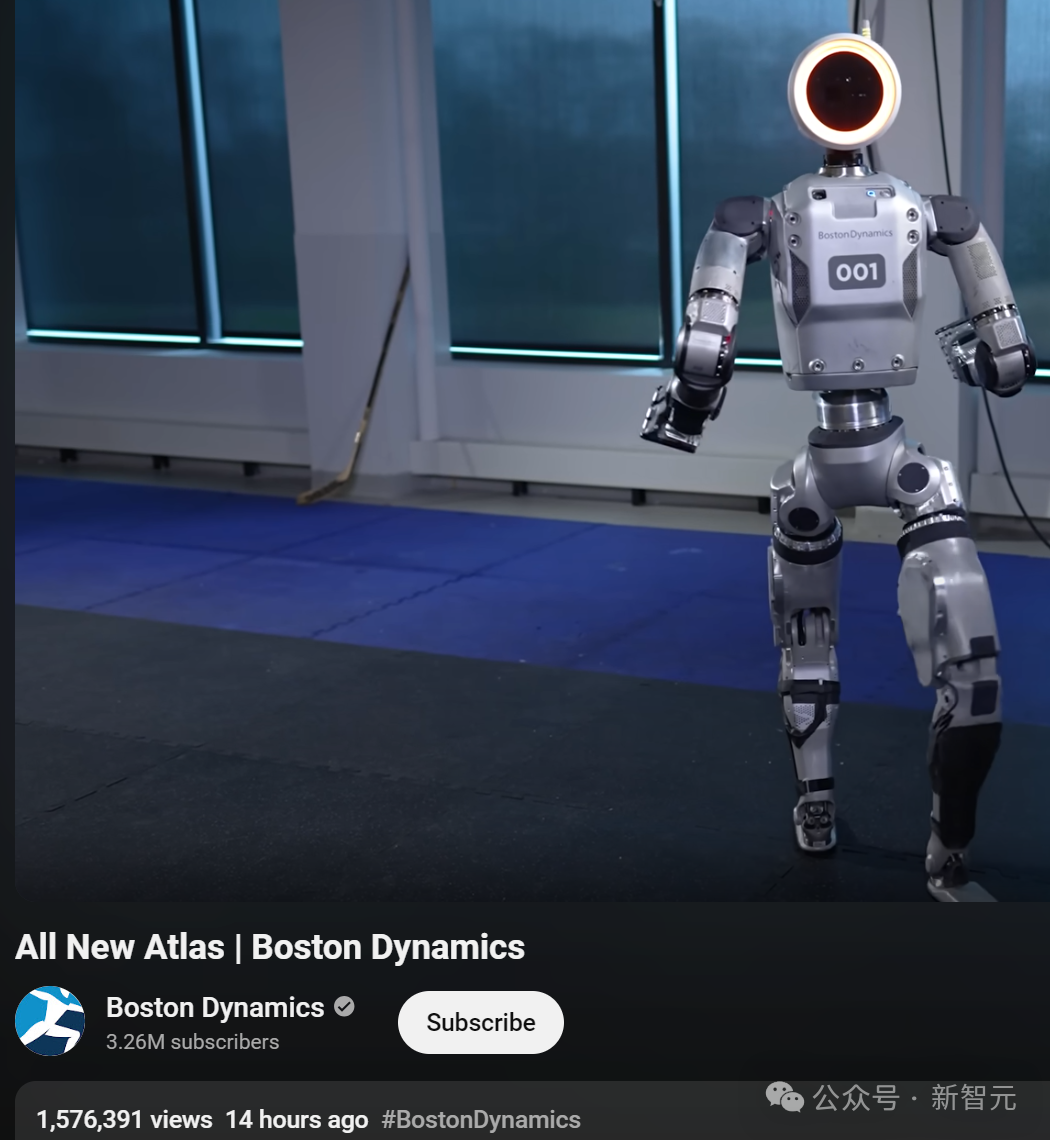
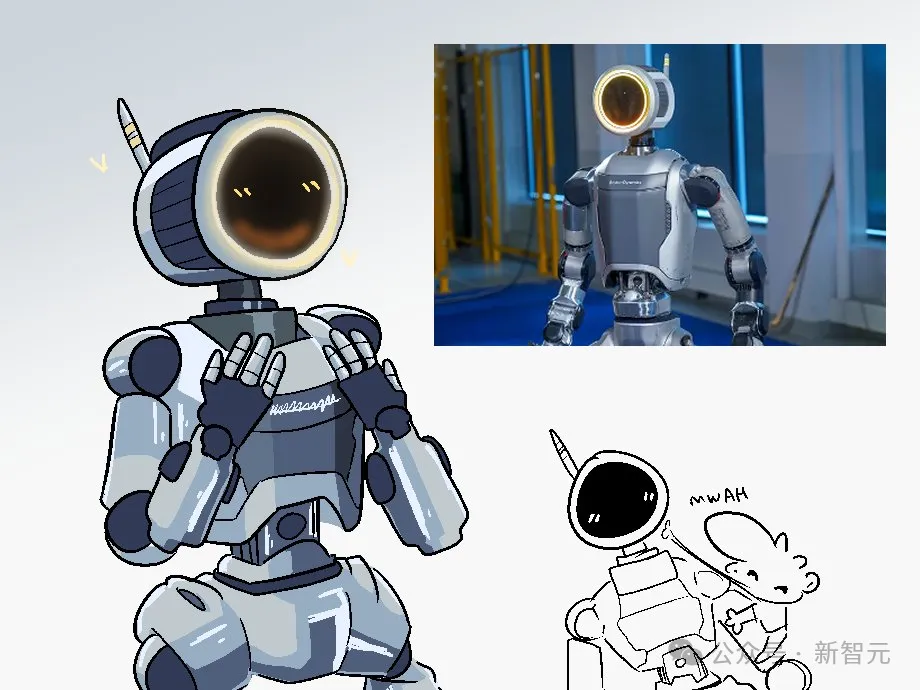
站起来后,他走向我们,向大家骄傲展示着它的头部——一个装饰有环形灯的圆形屏幕。

太克了,朋友们,这也太克了。当他步步逼近时,小编的内心只有一个想法:
随后,Atlas淡定地把头和躯干再次旋转180度,然后离开,只留给我们一个潇洒的背影,深藏功与名。

就是这么一个短短的不到半分钟的视频,已经让许多观众的内心极度炸裂了!
大家纷纷惊呼:恐怖片,这是恐怖片吧?

马斯克都来凑热闹
在《终结者》里,似乎也有类似的镜头……


波士顿动力Atlas,进入电动新时代
其实,波士顿动力用电动代替液压,这一步动作很多人都提前猜到了,就仿佛用汽车代替马车一样自然。
液压Atlas的退役,不意味着波士顿动力人形机器人计划的终结——新的Atlas回来了,比以前更好。
这也是史上首次,波士顿动力开始把Atlas人形机器人定义为一个「产品」。
虽然这是波士顿动力第一次从头构建一个全电动的人形机器人,但它一上来,就已经表现得足够惊艳。
全新的纯电动Atlas,由电池和电动执行器驱动,不再有凌乱的液压系统。就如我们上文所看到的,在力量和柔韧性上,它的表现都超越了人类。
更友好的外观
很明显,Atlas变了,变得让我们认不出来了。
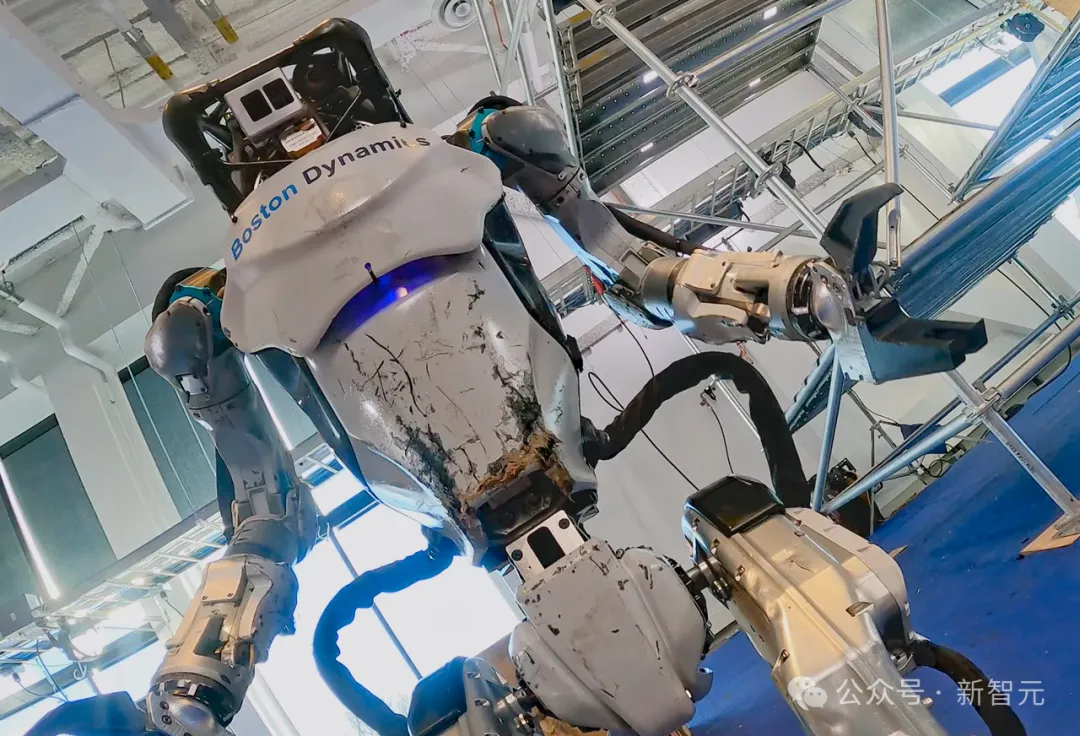
液压版的Atlas,有着头重脚轻的骨架,弯曲的腿部,和浑身覆盖着板甲的笨拙设计。

新款的Atlas,身形更苗条,有着更灵活的机械骨架,而且没有任何电缆外露。
这也算是波士顿动力对于公众担忧的一种妥协吧,毕竟,原版Atlas、Figure 01和特斯拉擎天柱的设计,对于公众真的有些不够友好。
也怪不得公众成天担忧,机器人要爆发起义,消灭人类了。
新关节,是180度
在预告片中,最引人注目的无疑就是Atlas流畅丝滑的动作了。
这也让我们意识到:打造一个人形机器人,就一定得让它看起来像真人吗?

曾有投资者表示,数十亿年的进化,都没能让人类变成完美的机器。既然我们要创造出类似自身形象的机器,那何不设计出能做成人类做不成的事情的机器呢?
因此,波士顿动力在Atlas的关节处设计了一套定制的高功率执行器。
这种设计极为灵活,极大地「解放」了Atlas。
打个形象的比喻,就相当于把一名顶尖运动员的力量,封装在了一个小巧的机身中,从而赋予了Atlas极大的活动范围。
让大多数观众吓到了的那个倒腿动作,也不仅仅是为了好看而已,它也体现了在工业环境中的实用性。
大多数工业机器人在出现故障时,都需要人工干预,如果一个机器人能自行复位,重新投入工作,效率就会大大提高。
Atlas的快速转身,也同样意义重大。
机器人给我们打工时,需要来回穿梭于各个货架和传送带之间。如果每天重复成百上千次,节省下来的每一秒,都价值千金。
在狭窄的空间中,转弯半径的显著减小,也更适合现有的工作流程和空间。
总的来说,一切的设计,都是为了机器人成为人类更好的打工人。
长着「化妆镜」头的三指生物
与传统的设计不同,电动Atlas继承了液压版的三指设计,而非市面上常见的四个手指。
打造一款能够执行广泛任务的机器人,最重要的是,确保执行器与外界接触可靠性和耐用性。
这也就解释了,波士顿动力设计出Atlas手指数少于五个的原因。
据介绍,他们还在不断探索和改进这一设计,以适应各种形状的灵活抓握,并配备高级感应系统,准确感知接触物体。
另一个引人注目的点便是,电动Atlas又大又圆的头部设计,特别像一个「化妆镜」。

而这也是背后团队专门打造的不同元素,区别于人类形象的独特设计。
CEO在采访中还透露了,这一设计的灵感来源是皮克斯动画工作室的小台灯。
「我们希望它看起来友好并且开放,不仅可以作为显示屏使用,其形状也传达了友好的意图,这对未来人机交互非常关键」。

质疑人类,成为人类,超越人类
总之,大家一致认为,比起自己想象中的机器人原型,电动版Atlas真的酷毙了!
最重要的是,它有全方向的关节,360度听觉视觉,打破了一定完全按照「人类物种」的样子去设计的原则。
正如英伟达AGI登月项目GR00T背后大佬Jim Fan所言:
我们对「人类水平」的机器人技术如此痴迷,以至于忘记了它只是一个人造天花板。为什么我们不从一开始就创造一个超越人类的新物种呢?

商业人形机器人,十年间已经变天
昨天液压版Atlas的退役,让许多人坚信,波士顿动力是铁了心要走商业化之路了。
「他们是想复制擎天柱吗?」
虽然很多人觉得,波士顿动力比特斯拉的技术领先了数光年,但这件事的发生并不意外,因为启发式方法太贵了。
但不可否认的是,特斯拉在商业化方面的确做得更成功。
当然,也有人觉得,把Atlas和特斯拉相比,就好像把法拉利和福特Model T相比一样。二者的唯一共同点,就是都是车。

2021年,波士顿动力被现代汽车收购后,明显加快了商业化步伐。
如今,Agility、Figure、1X和Apptronik都已经在人形机器人领域掀起了很大风浪,因此,波士顿动力也在认真考虑进入人形机器人商业市场了。
其实,在当前人形机器人的技术上,波士顿动力是处于领先地位的。
而液压系统,也很合时宜地退出了历史舞台。
昨天Atlas退役表演时的这个喷射液压油的摔倒,让很多人直呼膝盖疼
15年深耕,立志打造「全能」机器人
IEEE SPECTRUM第一时间,与波士顿动力的CEO Robert Playter开启深入交谈。
Robert Playter自1994年起担任波士顿动力的工程副总裁,那时公司还主要从事建模和仿真,尚未转向机器人技术。
2019年,Playter出任CEO,帮助公司从研发成功转型为商业化,相继推出了Spot机器狗、Stretch,以及换新的Atlas。
如下内容为采访要点:

问:目前的情况如何?为何耗时如此之长?
Robert Playter:全电动Atlas是团队近15年来,致力于人形机器人开发的最新成果。
首先我们相信,是可以造出一个能应对广泛任务的人形机器人的。它能在制造环境中双手操作/搬运重型且形状复杂的物体,这些任务复杂度远超我们之前的机器人模型。
另外一个原因是,电动Atlas一直在与传统的Atlas机器人并行开发。此前发布的视频,已经展示了这些技术的可行性。接下来,我们将设计一款性能远超以往任何机器的新一代机器人。
未来,我们计划将其作为产品投放市场,主要应用于工业、物流等领域。

问:对于机器狗Spot,波士顿动力并没有预设应用场景,而是直接开发出了产品并将其推向市场,然后让用户自行探索其适应性。那么,Atlas的开发策略有所不同吗?
Playter:Spot本质上就是一项寻找应用场景的技术,我们用了很长时间才确定了,它在工业检测中的市场定位。
而这次经历的挑战,也让我们决定大规模生产之前,首先明确目标应用场景。

大家可以在针对明确目标市场推出的Stretch身上,看到不同。
当然,Atlas的定位与Stretch类似,但它的功能将不限于单一任务,而是实现更广泛的应用。
问:Atlas的愿景是成为一款「通用人形机器人」吗?
Playter:它必须是一款「多功能」机器人。之所以这么说,是因为目前很少有机器人能将自己执行单一重复任务的能力,推广到其他更为复杂的任务上。
问:将新版Atlas视为一款产品,而非一个研究平台,会改变些什么?
Playter:团队过去这10-15年的研究,对于开发首个实用人形机器人来说至关重要。
诸如动态平衡和移动能力,都是为了确保机器人能够在移动中捡起物体。
现在,我们已经掌握了这些对执行实际工作非常关键的技术。
不过在通用性方面,还有待加强。比如让机器人从数千种不同的零件中,取出需要用到的那个。
目前来说,这种广泛适用性还未得到证实。但我们认为,AI将是解决这一问题的关键工具之一。
最后,在我们开始大规模生产,并向客户交付这些机器人之前,还需要进行大量的产品原型设计和迭代。
问:在很长一段时间里,「液压」被认为是Atlas实现强大动态运动的最佳方式。如今,这种情况为何发生了变化?
Playter:我们首先在Spot的发布上进行了试验。
多年前我们就遇到了同样的问题,后来我们便开发了强大且轻便的电动马达,其响应性和力量可以满足需求。
随后,我们又为电动Atlas设计了一系列全新的「紧凑型执行器」,将「专业运动员」的力量集成在了小型设备当中。由此,新机器人的关节在力量和运动范围上,都超越了人类。
而且,通过对比我们也发现,电动Atlas要比液压Atlas更强。
问:体现运动范围的那段视频让人感觉有些不适,为什么要以这种方式展示新版Atlas呢?
Playter:这些具有高度运动范围的执行器将赋予机器人一系列独特的动作,从而极大地提升其工作效率。
想象一下,如果机器人能够直接转身,而不是需要迈好几步来转动整个身体,会有多么方便。
这种灵活性为设计新功能提供了无限可能,我们已经开始享受这种创新的乐趣,并决定与全世界一起分享。
问:有观点认为,机器人需要以大家熟悉和可预测的方式移动,这样在它们周围工作时才不会感觉到不舒服。对此,您怎么看?
Playter:的确如此,但这并不意味着,我们只能限制机器人模仿人类的动作。
相比之下,如果机器人更强大或更灵活,它就能完成人类无法或不愿意做的任务。
比如第一代Stretch的关节,就不能进行180度的旋转。因此它在转身拿取和放置箱子时,动作非常缓慢。
随后,我们增加了一个能够旋转的关节,这让Stretch的动作更加迅速和高效。
最终,大家也逐渐习惯了这种新的动作模式。
问:电动Atlas机器人的头部为何设计成现在这样?
Playter:旧版的Atlas机器人没有头部。而新版的头部,不仅是机器人表达意图的工具,而且还集成了可以与用户进行交流的灯光。
在最初的设计中,我们尝试过更类似于人类的形状。但这种设计总给人一种威胁感,甚至有点像是来自反乌托邦的科幻作品。
因此,我们特意选择了圆形的头部设计,目的就是为了让它看起来不那么像人类。我们也希望通过这种设计传达出一种友好的氛围。
顺便一提,这个设计也借鉴了大家熟知的皮克斯动画工作室的小台灯。
问:这些年的经验积累,是如何帮助Atlas变成一款产品的?
Playter:仅凭一些有趣的技术远远不足以让产品成功,你必须有一个切实的应用场景,并且围绕这个场景提供真正的生产力。
起初,所有人都有可能会买一台试试,但只有当你能向同一个客户销售多台机器人时,业务才算正式开张。如果没有足够的可靠性、服务和系统整合,是无法达到这一点的。

几年前,当我们开始将Spot作为产品推向市场时,实际上是在对公司进行一次全面转型。
为此,我们必须掌握全新的领域:制造、服务、评估机器人的质量和可靠性,并建立系统和工具来进行持续的改进。同时,还需要以合理的成本生产,再以合理的价格销售,并最终获利。
这种转变需要两到三年的时间来完成,因此所有那些只有一个原型机的初创公司,大概率还没有开始这段旅程。
所以,我们现在并不急于展示技术上的突破,也不会轻易表明意图,直到确定了有可行的产品路径。我认为,这将是获得成功的关键。
问:之后有哪些计划?
Playter:我们即将在新版Atlas上展示更多的操控技术,也就是已经在旧版上展示过的那些。
预计最早明年,新版机器人就可以去到现代汽车的工厂里,进行技术验证了。
问:大家对新版Atlas最感兴趣的点会是什么呢?
Playter:在重量轻、尺寸小、灵活度高的同时,还拥有强大的功能。所有人看到之后都会发出惊叹:「哇,原来还可以这样!」
一直以来,其他公司都在把我们当做标杆进行比较,而现在这一标准再次得到了提升。我相信这最终会带动整个行业向前发展。




























