







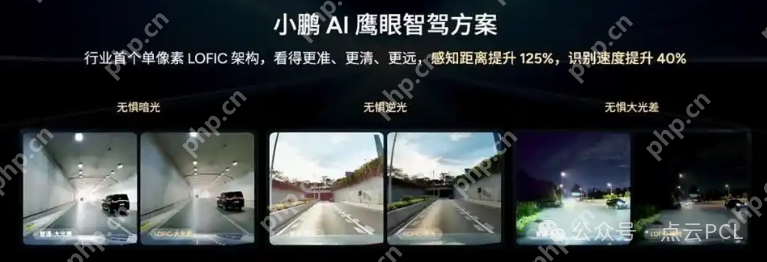
在智能驾驶领域,摄像头被誉为车辆的“眼睛”,其动态范围(dynamic range)是决定这双眼睛能否在明暗环境中清晰识别的关键因素。传统摄像头在面对逆光、隧道和夜间强光等复杂光线条件时,常会“失明”,小鹏汽车的lofic(lateral overflow integration capacitor,横向溢出积分电容)技术通过“光电魔术”突破了物理极限,重新定义了车载视觉的巅峰。本文将深入探讨lofic技术的原理与优势,并结合小鹏g6/g9的实际应用,揭示其如何超越特斯拉、理想等竞争对手的摄像头方案,引领智能驾驶的“视觉革命”。

动态范围的重要性
动态范围是衡量摄像头成像性能的关键指标,代表传感器在同一画面中同时捕捉最亮(如阳光直射)和最暗(如阴影)区域细节的能力。传统车载摄像头在逆光、隧道出入口等场景下容易出现过曝或欠曝,导致智能驾驶系统误判或“失明”,成为安全隐患。动态范围以dB(分贝)为单位,传统车载摄像头的动态范围通常在100-120dB,但现实场景的挑战远超这一阈值:
隧道出口:瞬间亮度变化超过140dB,摄像头“失明”导致车道线丢失;夜间对向远光灯:高亮光源淹没行人轮廓,引发误刹车;雨雪低光照:暗部噪点掩盖障碍物,增加碰撞风险。这些问题直接威胁智能驾驶的安全性,而提升动态范围成为行业共同难题。

LOFIC的核心原理
传统HDR技术通过多帧合成(多次曝光+算法融合)提升动态范围,但会导致延迟高、运动模糊等问题。LOFIC则从硬件底层重构了传感器设计:
1. 核心原理:电容“蓄水池”
横向溢出电容:每个像素旁增加一个电容,当光线过强时,多余电荷暂存于电容,避免像素饱和(传统传感器直接丢弃溢出电荷)。双信号读取:同时采集主像素和电容中的电荷,单帧输出高动态范围图像(140dB+)。单帧处理:无需多帧合成,消除延迟和拖影,适用于高速动态场景。

2. LOFIC技术的三大优势

极端光线下的可靠感知:逆光场景:例如进出隧道时,LOFIC可清晰识别前方车辆轮廓和车道线,避免因强光“失明”导致的急刹风险。夜间强光干扰:对向车辆远光灯、交通信号灯等高亮光源的抑制能力更强,减少误触发紧急制动。
提升智能驾驶系统的决策效率:单帧处理:无需多帧合成,降低计算负载,提升XNGP(小鹏城市导航辅助驾驶)的实时响应速度。细节保留:暗部噪点减少,雨雪天气下更易识别低对比度障碍物(如黑色轮胎、深色衣物行人)。
3. 硬件成本与性能的平衡
相比激光雷达方案,LOFIC通过优化摄像头性能,以更低成本实现感知能力的跃升。小鹏G6/G9采用“视觉为主+激光雷达冗余”的融合方案,LOFIC技术进一步强化了视觉系统的可靠性,降低了对激光雷达的依赖频率。成本与性能的完美平衡
对比激光雷达:单颗激光雷达成本约1000美元,而LOFIC摄像头的增量成本仅为其1/5,却解决了80%的极端场景问题;对比4D毫米波雷达:LOFIC在垂直高度识别(如桥梁限高杆)上更具优势,且不受天气干扰。小鹏G6/G9采用“LOFIC视觉为主+激光雷达冗余”的融合方案,既保障安全,又避免过度堆料。场景实测数据
据小鹏官方测试,搭载LOFIC的G6/G9在以下场景表现提升显著:
隧道出口识别距离:从传统摄像头的50米提升至80米。夜间行人识别率:提高30%,误报率下降45%。

总结
LOFIC技术证明,通过底层硬件创新而非单纯堆砌传感器数量,同样可以突破智能驾驶的感知瓶颈。这为行业提供了“降本增效”的新思路。该技术不仅是小鹏汽车的核心竞争力,更代表着中国车企在智能驾驶底层技术领域的突破。随着算法与硬件的持续迭代,未来的汽车将真正具备“人类级”甚至“超人类”的视觉能力,而小鹏已在这场革命中占据了先机。




























