







当完成所有硬件的选型工作后,下一步便是操作系统的评估与选择。
在方案设计阶段,查阅大量技术资料后发现,当前机器人底层系统普遍采用ROS1或ROS2架构。由于我们前期选用的是国产化核心板,该平台对嵌入式Linux及Android系统具备良好的兼容性,因此理论上能够稳定支持ROS2的运行环境。
选择ROS2进行开发
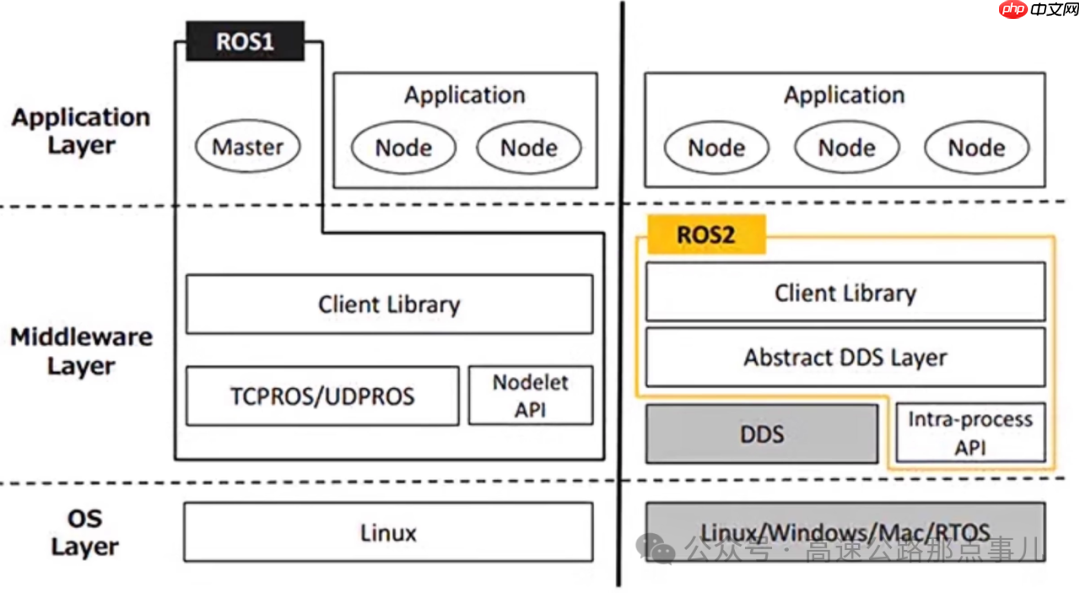 ROS2强调模块化设计和跨平台能力,支持多机器人之间的通信协作,采用DDS(数据分发服务)协议实现去中心化的通信机制。
ROS2强调模块化设计和跨平台能力,支持多机器人之间的通信协作,采用DDS(数据分发服务)协议实现去中心化的通信机制。
其本质是一个面向机器人的软件开发框架,位于中间件层级,提供分布式通信机制、完整的工具链以及丰富的机器人算法库。它的核心优势在于统一了各功能模块间的交互标准(如节点自动发现、消息传递机制),并通过DDS协议保障高效、可靠的实时通信。
针对机器人应用场景进行了深度优化,具备动态节点发现、多机协同能力和灵活的QoS策略配置(例如数据优先级控制、延迟敏感性调整),特别适用于需要高频采集与传输传感器数据的应用场景。
借助DDS的QoS机制可实现软实时性能(响应时间在毫秒级),若需达到硬实时要求(微秒级抖动控制),则需结合实时内核补丁(如PREEMPT_RT)进行增强。
开发模式以节点为中心,开发者只需专注于具体功能模块(如路径规划、图像识别等)的封装及其接口定义,配合高度集成的开发工具链,大幅提升开发效率。
同时可复用ROS生态中成熟的开源组件(如导航栈、MoveIt运动规划框架),显著降低重复造轮子的成本;代码具备跨平台部署能力,可在x86与ARM架构上无缝迁移。
此外,ROS2引入生命周期管理机制,支持远程热更新,能够在不中断系统运行的前提下修复问题,有效减少现场维护频率。
 ### 嵌入式Linux原生开发方式
### 嵌入式Linux原生开发方式
嵌入式Linux本身是完整的操作系统内核,负责硬件抽象、进程调度、内存管理等底层资源协调任务。其主要价值体现在提供稳定的驱动支持和基础系统服务能力。
SHCCMS(世惠诚企业网站管理系统)是南阳世惠诚科技有限公司负责开发的企业(公司)CMS网站内容管理系统。 主要功能 针对世惠诚企业网站管理而进行开发,该软件可以进行网站制作流程,客户案例,服务器参数,品牌设计,网站建设,新闻动态等操作。软件正在不断扩展应用接口,完善系统数据维护功能。系统还具有数据回收站机制。能对数据进行回收和撤回操作。软件界面设计简洁,美观。其人性化的软件
这类系统广泛应用于通用嵌入式设备,注重长期运行稳定性、低功耗表现以及广泛的硬件适配能力,适合功能固定且需持续工作的场景。
默认情况下不具备实时处理能力,但可通过打上Linux-RT补丁升级为硬实时系统。
开发过程通常从底层驱动入手,涉及内核裁剪、设备树配置、文件系统构建等环节,开发周期较长,技术门槛较高,但换来的是极高的系统稳定性和可控性。
可直接访问硬件外设(如GPIO、PWM、I2C等接口),非常适合有深度定制需求的应用场合。
 ### 两种方案对比分析
### 两种方案对比分析
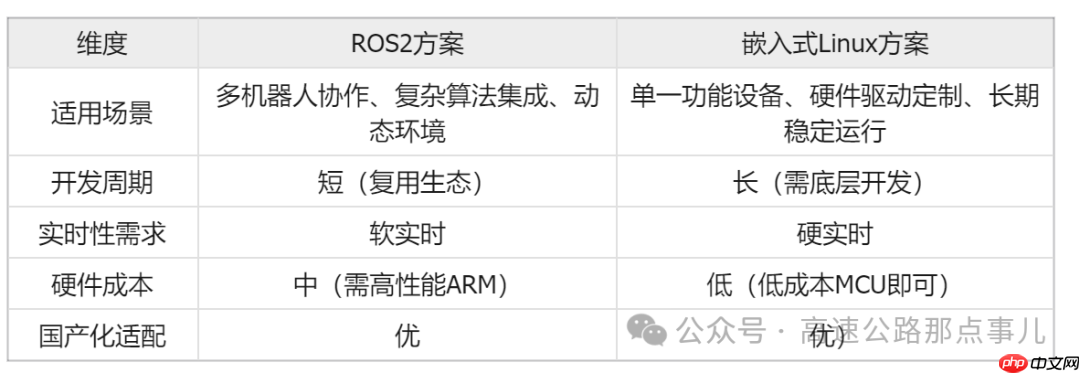 ### 总结
### 总结
目前,ROS2的目标是成为适用于绝大多数机器人产品的通用操作系统平台。事实上,如今绝大多数机器人企业在启动新项目时都会优先选择ROS2作为核心技术框架。
综合考虑本项目的开发周期、团队协作效率以及生态系统支撑能力,最终决定采用ROS2作为主技术路线。(额外说明:尽管我们在Linux底层开发方面经验丰富,但在机器人快速落地的大背景下,顺应主流趋势、减少试错成本更为关键。)
在设计过程中也曾评估鸿蒙系统的可行性,经过多方论证,确定第一阶段先采用“Linux + ROS2”的架构方案,在产品功能趋于成熟稳定后,再逐步推进向鸿蒙系统的迁移工作。




























