


☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜


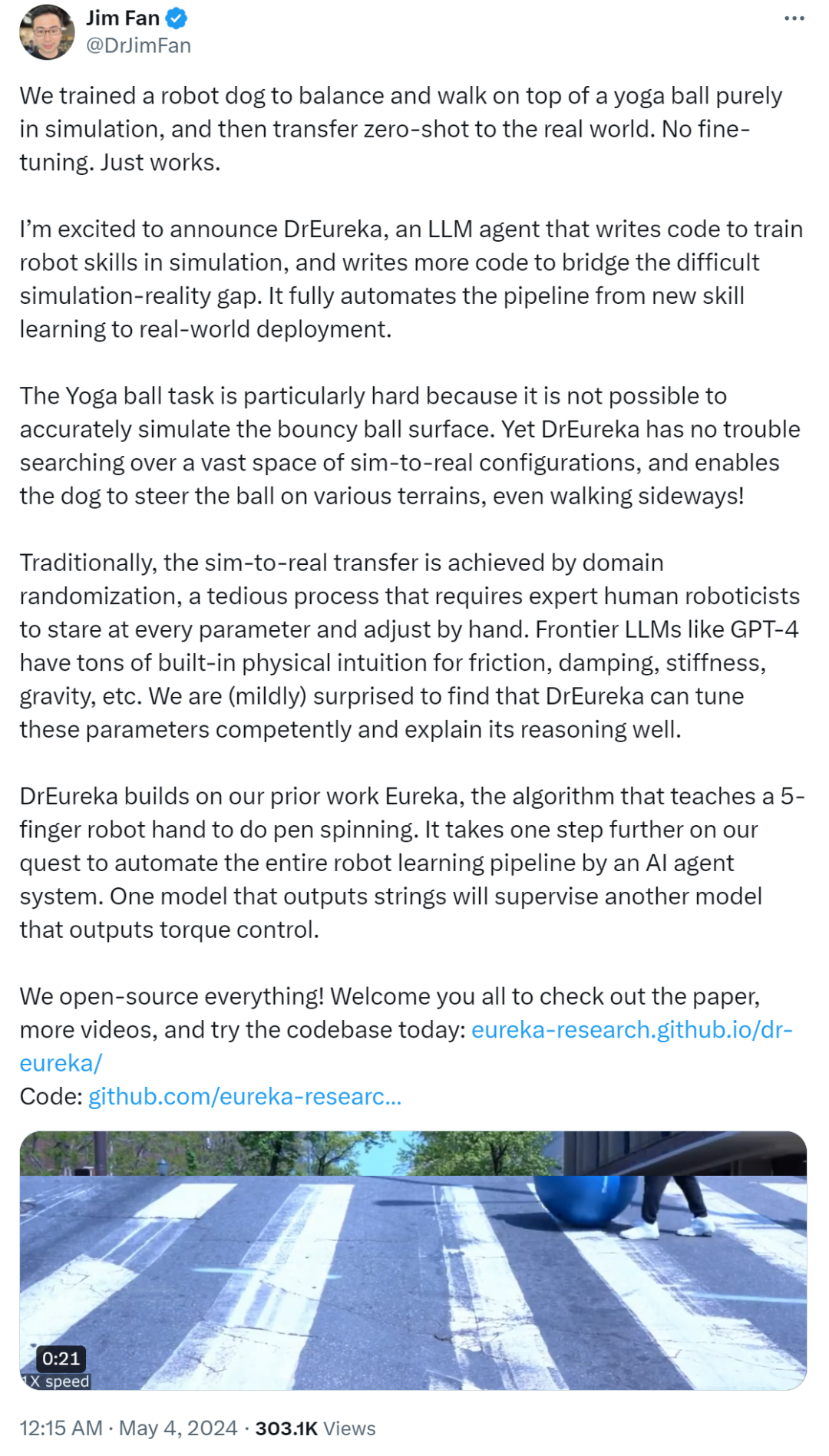
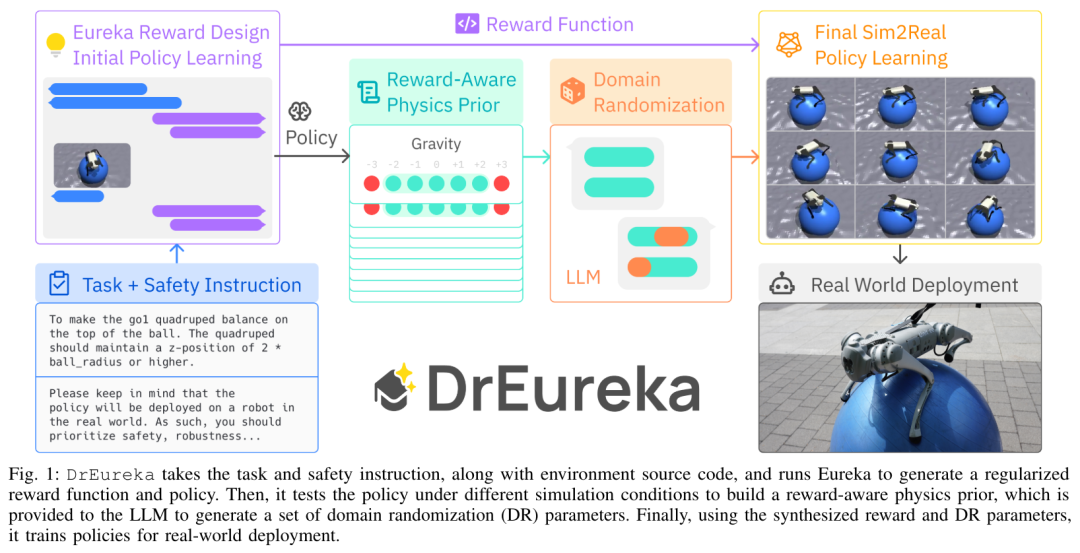
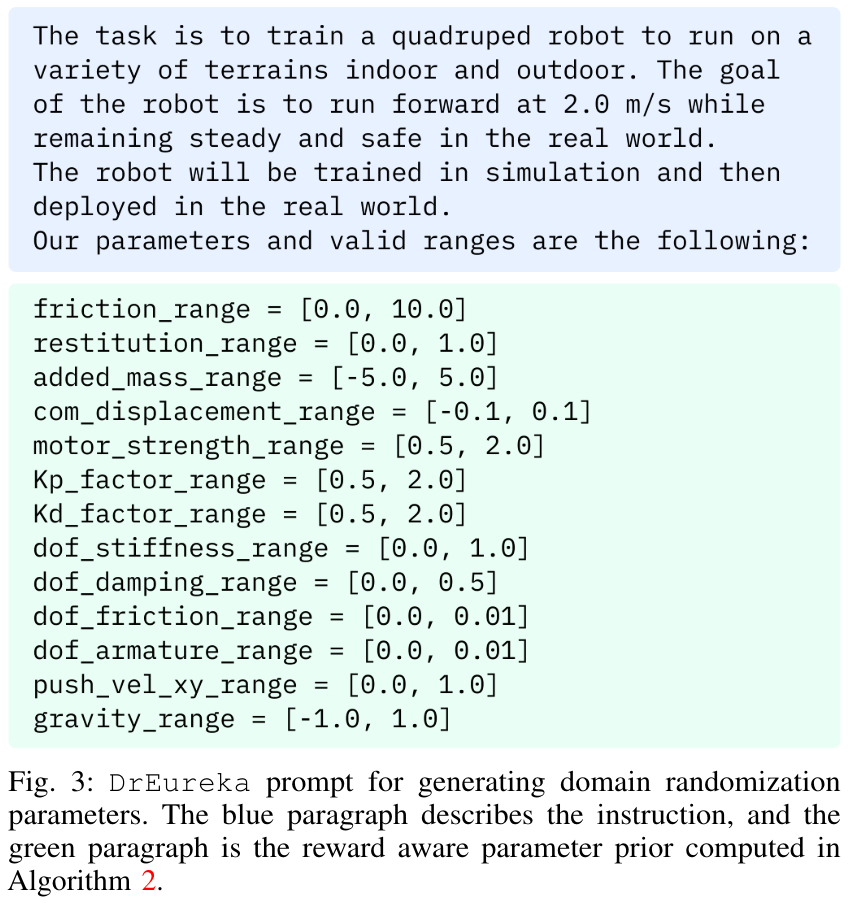
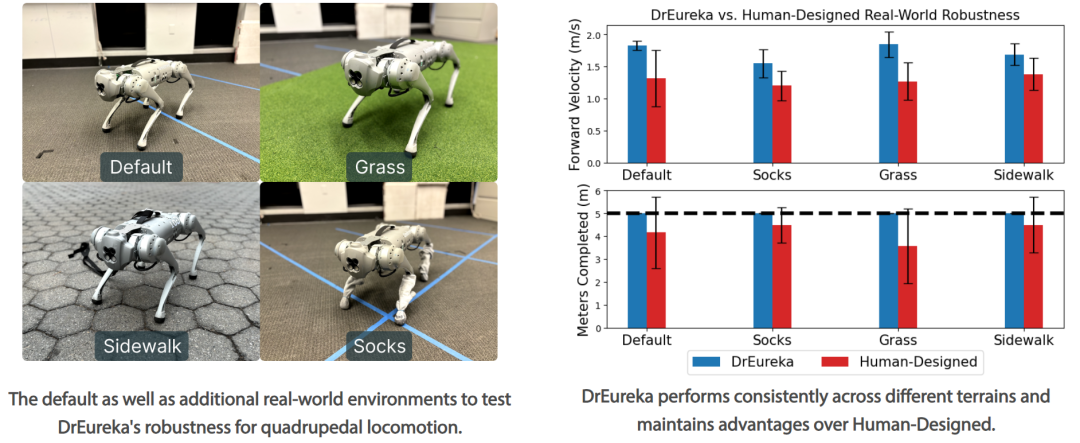
论文地址:https://eureka-research.github.io/dr-eureka/assets/dreureka-paper.pdf 项目主页:https://github.com/eureka-research/DrEureka 论文标题:DrEureka: Language Model Guided Sim-To-Real Transfer


0


0

WBOY
发布时间:2024-05-05 13:01:01
|656人浏览过
|来源于机器之心
转载
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
相关文章
aishort怎么避免重复生成内容_aishort优化输入方式实用技巧【技巧】
PerplexityAI怎么改写已有文章_PerplexityAI文本优化技巧【技巧】
如何提升代码运行的稳定性和效率 利用DeepSeek进行自动化回归测试
如何快速掌握复杂的电路仿真设计 利用豆包AI进行理论与实践步骤指导
如何零基础学会利用AI进行内容创作 利用DeepSeek制定全套学习成长计划
本站声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系admin@php.cn
热门AI工具

相关专题

github中文官网入口https://docs.github.com/zh/get-started,GitHub 是一种基于云的平台,可在其中存储、共享并与他人一起编写代码。 通过将代码存储在GitHub 上的“存储库”中,你可以: “展示或共享”你的工作。 持续“跟踪和管理”对代码的更改。
4484
2026.01.21


http与https的区别:1、协议安全性;2、连接方式;3、证书管理;4、连接状态;5、端口号;6、资源消耗;7、兼容性。本专题为大家提供相关的文章、下载、课程内容,供大家免费下载体验。
2957
2024.08.16

本专题系统讲解 PHP 在命令行环境(CLI)下的开发与应用,内容涵盖 PHP CLI 基础、参数解析、文件与目录操作、日志输出、异常处理,以及与 Linux 定时任务(Cron)的结合使用。通过实战示例,帮助开发者掌握使用 PHP 构建 自动化脚本、批处理工具与后台任务程序 的能力。
73
2025.12.13

本专题围绕 TypeScript 在大型前端项目中的应用展开,深入讲解类型系统设计与工程化开发方法。内容包括泛型与高级类型、类型推断机制、声明文件编写、模块化结构设计以及代码规范管理。通过真实项目案例分析,帮助开发者构建类型安全、结构清晰、易维护的前端工程体系,提高团队协作效率与代码质量。
90
2026.03.13

本专题围绕 Python 异步编程模型展开,深入讲解 Asyncio 框架的核心原理与应用实践。内容包括事件循环机制、协程任务调度、异步 IO 处理以及并发任务管理策略。通过构建高并发网络请求与异步数据处理案例,帮助开发者掌握 Python 在高并发场景中的高效开发方法,并提升系统资源利用率与整体运行性能。
136
2026.03.12

本专题围绕 C# 在现代后端架构中的微服务实践展开,系统讲解基于 ASP.NET Core 构建可扩展服务体系的核心方法。内容涵盖服务拆分策略、RESTful API 设计、服务间通信、API 网关统一入口管理以及服务治理机制。通过真实项目案例,帮助开发者掌握构建高可用微服务系统的关键技术,提高系统的可扩展性与维护效率。
377
2026.03.11

本专题围绕 Go 语言在高并发任务处理场景中的实践展开,系统讲解 Goroutine 调度模型、Channel 通信机制以及并发控制策略。内容包括任务队列设计、Goroutine 池化管理、资源限制控制以及并发任务的性能优化方法。通过实际案例演示,帮助开发者构建稳定高效的 Go 并发任务处理系统,提高系统在高负载环境下的处理能力与稳定性。
64
2026.03.10

本专题围绕 Kotlin 在 Android 应用开发中的架构实践展开,重点讲解模块化设计与组件化开发的实现思路。内容包括项目模块拆分策略、公共组件封装、依赖管理优化、路由通信机制以及大型项目的工程化管理方法。通过真实项目案例分析,帮助开发者构建结构清晰、易扩展且维护成本低的 Android 应用架构体系,提升团队协作效率与项目迭代速度。
111
2026.03.09
热门下载
相关下载
精品课程
最新文章
Copyright 2014-2026 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号


















