



☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜

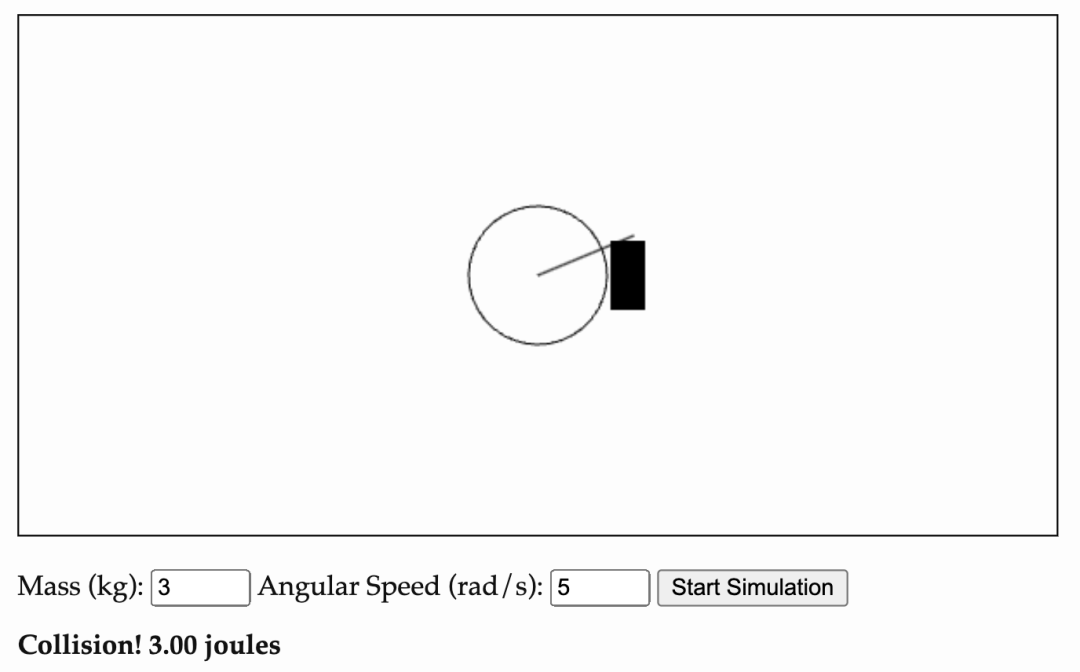
 ,其中 I 是转动惯量,ω 是角速度。因为假设杠杆没有质量,系统的惯性相当于一个固定的圆柱体:
,其中 I 是转动惯量,ω 是角速度。因为假设杠杆没有质量,系统的惯性相当于一个固定的圆柱体: 。代入数值可以算出 I = 0.24 kg⋅m^2。因此,可以进一步算出这个系统的旋转动能为 3 焦耳。
。代入数值可以算出 I = 0.24 kg⋅m^2。因此,可以进一步算出这个系统的旋转动能为 3 焦耳。



0


0

PHPz
发布时间:2024-09-02 20:14:13
|1160人浏览过
|来源于机器之心
转载
☞☞☞AI 智能聊天, 问答助手, AI 智能搜索, 免费无限量使用 DeepSeek R1 模型☜☜☜
,其中 I 是转动惯量,ω 是角速度。因为假设杠杆没有质量,系统的惯性相当于一个固定的圆柱体:。代入数值可以算出 I = 0.24 kg⋅m^2。因此,可以进一步算出这个系统的旋转动能为 3 焦耳。
相关文章
AI生成活动现场的即时新闻稿
贾跃亭:法拉第未来当前股价被严重低估 目标价5美元
内存飙升成本暴涨 汽车会涨价还是减配?
10家中国车企入围入围财富世界500强 比亚迪进前百
关税压力下创纪录!韩国汽车年出口额达720亿美元
相关标签:
本站声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有涉嫌抄袭侵权的内容,请联系admin@php.cn
热门AI工具

相关专题

http与https的区别:1、协议安全性;2、连接方式;3、证书管理;4、连接状态;5、端口号;6、资源消耗;7、兼容性。本专题为大家提供相关的文章、下载、课程内容,供大家免费下载体验。
2922
2024.08.16

本专题围绕 TypeScript 在大型前端项目中的应用展开,深入讲解类型系统设计与工程化开发方法。内容包括泛型与高级类型、类型推断机制、声明文件编写、模块化结构设计以及代码规范管理。通过真实项目案例分析,帮助开发者构建类型安全、结构清晰、易维护的前端工程体系,提高团队协作效率与代码质量。
25
2026.03.13

本专题围绕 Python 异步编程模型展开,深入讲解 Asyncio 框架的核心原理与应用实践。内容包括事件循环机制、协程任务调度、异步 IO 处理以及并发任务管理策略。通过构建高并发网络请求与异步数据处理案例,帮助开发者掌握 Python 在高并发场景中的高效开发方法,并提升系统资源利用率与整体运行性能。
44
2026.03.12

本专题围绕 C# 在现代后端架构中的微服务实践展开,系统讲解基于 ASP.NET Core 构建可扩展服务体系的核心方法。内容涵盖服务拆分策略、RESTful API 设计、服务间通信、API 网关统一入口管理以及服务治理机制。通过真实项目案例,帮助开发者掌握构建高可用微服务系统的关键技术,提高系统的可扩展性与维护效率。
177
2026.03.11

本专题围绕 Go 语言在高并发任务处理场景中的实践展开,系统讲解 Goroutine 调度模型、Channel 通信机制以及并发控制策略。内容包括任务队列设计、Goroutine 池化管理、资源限制控制以及并发任务的性能优化方法。通过实际案例演示,帮助开发者构建稳定高效的 Go 并发任务处理系统,提高系统在高负载环境下的处理能力与稳定性。
50
2026.03.10

本专题围绕 Kotlin 在 Android 应用开发中的架构实践展开,重点讲解模块化设计与组件化开发的实现思路。内容包括项目模块拆分策略、公共组件封装、依赖管理优化、路由通信机制以及大型项目的工程化管理方法。通过真实项目案例分析,帮助开发者构建结构清晰、易扩展且维护成本低的 Android 应用架构体系,提升团队协作效率与项目迭代速度。
92
2026.03.09

本专题围绕 JavaScript 在浏览器中的执行与渲染机制展开,系统讲解 DOM 构建、CSSOM 解析、重排与重绘原理,以及关键渲染路径优化方法。内容涵盖事件循环机制、异步任务调度、资源加载优化、代码拆分与懒加载等性能优化策略。通过真实前端项目案例,帮助开发者理解浏览器底层工作原理,并掌握提升网页加载速度与交互体验的实用技巧。
102
2026.03.06

本专题围绕 Rust 语言核心特性展开,深入讲解所有权机制、借用规则、生命周期管理以及智能指针等关键概念。通过系统级开发案例,分析内存安全保障原理与零成本抽象优势,并结合并发场景讲解 Send 与 Sync 特性实现机制。帮助开发者真正理解 Rust 的设计哲学,掌握在高性能与安全性并重场景中的工程实践能力。
227
2026.03.05

本专题围绕 PHP 在现代 Web 后端开发中的高性能实践展开,重点讲解基于 Laravel 框架构建可扩展 API 服务的核心方法。内容涵盖路由与中间件机制、服务容器与依赖注入、接口版本管理、缓存策略设计以及队列异步处理方案。同时结合高并发场景,深入分析性能瓶颈定位与优化思路,帮助开发者构建稳定、高效、易维护的 PHP 后端服务体系。
530
2026.03.04
热门下载
相关下载
精品课程
最新文章
Copyright 2014-2026 https://www.php.cn/ All Rights Reserved | php.cn | 湘ICP备2023035733号
















